Performs Kalman filtering and evaluates the likelihood function for the state-space model.
Synopsis
#include <imsls.h>
void imsls_f_kalman (int nb, float nb[], float covb[], int *n, float *ss, float *alndet, ..., 0)
The type double function is imsls_d_kalman.
Required Arguments
int nb
(Input)
Number of elements in the state vector.
float b[]
(Input/Output)
Array of length nb containing the
estimated state vector. The input is the estimated state vector at time k
given the observations through time k − 1. The output is the
estimated state vector at time k + 1 given the observations through
time k. On the first call to imsls_f_kalman,
the input b must
be the prior mean of the state vector at time 1.
float covb[]
(Input/Output)
Array of size nb by nb such that covb* σ 2 is
the mean squared error matrix for b.
Before the first call to imsls_f_kalman,
covb * σ 2
must equal the variance-covariance matrix of the state vector.
int *n
(Input/Output)
Pointer to the rank of the variance-covariance matrix for all
the observations. n must be initialized
to zero before the first call to imsls_f_kalman.
In the usual case when the variance-covariance matrix is nonsingular, n equals the sum of
the ny’s from
the invocations to imsls_f_kalman. See optional argument IMSLS_UPDATE below for
the definition of ny.
float *ss
(Input/Output)
Pointer to the generalized sum of squares.
ss must be initialized
to zero before the first call to imsls_f_kalman.
The estimate of σ 2 is
given by  .
.
float *alndet
(Input/Output)
Pointer to the natural log of the product of the nonzero
eigenvalues of P where P * σ 2 is
the variance-covariance matrix of the observations. Although alndet is computed,
imsls_f_kalman
avoids the explicit computation of P. alndet must be
initialized to zero before the first call to imsls_f_kalman.
In the usual case when P is nonsingular, alndet is the natural
log of the determinant of P.
Synopsis with Optional Arguments
#include <imsls.h>
void
imsls_f_kalman (int
nb,
float nb[],
float
covb[],
int *n,
float *ss,
float
*alndet,
IMSLS_UPDATE,
int
ny,
float
*y,
float
*z,
float
*r,
IMSLS_Z_COL_DIM,
int
z_col_dim,
IMSLS_R_COL_DIM,
int
r_col_dim,
IMSLS_T,
float
*t,
IMSLS_T_COL_DIM,
int
t_col_dim,
IMSLS_Q,
float
*q,
IMSLS_Q_COL_DIM,
int
t_col_dim,
IMSLS_TOLERANCE,
float
tolerance,
IMSLS_V,
float
**v,
IMSLS_V_USER,
float
v[],
IMSLS_COVV,
float
**v,
IMSLS_COVV_USER,
float
v[],
0)
Optional Arguments
IMSLS_UPDATE, int ny,
float
*y, float *z,
float
*r (Input)
Perform computation of the update
equations. ny: Number of
observations for current update.
y: Array of length ny containing the observations.
z: ny by nb array containing the matrix relating the observations to the state vector in the observation equation.
r: ny by ny array containing
the matrix such that r * σ 2 is
the variance-covariance matrix of errors in the observation equation.
σ 2 is
a positive unknown scalar. Only elements in the upper triangle of r are referenced.
IMSLS_Z_COL_DIM, int z_col_dim
(Input)
Column dimension of the matrix
z.
Default:
z_col_dim = nb
IMSLS_R_COL_DIM, int r_col_dim
(Input)
Column dimension of the matrix
r.
Default:
r_col_dim = ny
IMSLS_T, float *t
(Input)
nb by
nb transition
matrix in the state equation
Default: t = identity
matrix
IMSLS_T_COL_DIM, int r_col_dim
(Input)
Column dimension of the matrix
t.
Default:
t_col_dim = nb
IMSLS_Q, float *q
(Input)
nb by
nb matrix such
that q * σ2 is the
variance-covariance matrix of the error vector in the state equation.
Default: There is no error term in the state equation.
IMSLS_Q_COL_DIM, int q_col_dim
(Input)
Column dimension of the matrix
q.
Default:
q_col_dim = nb
IMSLS_TOLERANCE, float tolerance
(Input)
Tolerance used in determining linear dependence.
Default: tolerance = 100.0*imsls_f_machine(4)
IMSLS_V, float **v
(Output)
Address to a pointer v to an array of
length ny
containing the one-step-ahead prediction error.
IMSLS_V_USER, float v[]
(Output)
Storage for v is provided by the
user. See IMSLS_V.
IMSLS_COVV, float **covv
(Output)
The address to a pointer of size ny by ny containing a matrix
such that covv
* σ2
is the variance-covariance matrix of v.
IMSLS_COVV_USER, float covv[]
(Output)
Storage for covv is provided by
the user. See IMSLS_COVV.
Description
Function imsls_f_kalman is based on a recursive algorithm given by Kalman (1960), which has come to be known as the Kalman filter. The underlying model is known as the state-space model. The model is specified stage by stage where the stages generally correspond to time points at which the observations become available. The function imsls_f_kalman avoids many of the computations and storage requirements that would be necessary if one were to process all the data at the end of each stage in order to estimate the state vector. This is accomplished by using previous computations and retaining in storage only those items essential for processing of future observations.
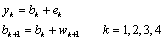
The notation used here follows that of Sallas and Harville (1981). Let yk (input in y using optional argument IMSLS_UPDATE) be the nk × 1 vector of observations that become available at time k. The subscript k is used here rather than t, which is more customary in time series, to emphasize that the model is expressed in stages k = 1, 2, … and that these stages need not correspond to equally spaced time points. In fact, they need not correspond to time points of any kind. The observation equation for the state-space model is
yk = Zkbk + ek k = 1, 2, …
Here, Zk (input in z using optional argument IMSLS_UPDATE) is an nk × q known matrix and bk is the q × 1 state vector. The state vector bk is allowed to change with time in accordance with the state equation
bk+1 = Tk+1bk + w k+1 k = 1, 2, …
starting with b1 = μ1 + w1.
The change in the state vector from time k to k + 1 is explained in part by the transition matrix T k+1 (the identity matrix by default, or optionally input using IMSLS_T), which is assumed known. It is assumed that the q-dimensional wks (k = 1, 2,…) are independently distributed multivariate normal with mean vector 0 and variance-covariance matrix σ2Qk, that the nk-dimensional eks (k = 1, 2,…) are independently distributed multivariate normal with mean vector 0 and variance-covariance matrix σ2Rk, and that the wks and eks are independent of each other. Here, μ1 is the mean of b1 and is assumed known, σ2 is an unknown positive scalar. Qk+1(input in Q) and Rk (input in R) are assumed known.
Denote the estimator of the realization of the state vector bk given the observations y1, y2, …, yj by

By definition, the mean squared error matrix for
is

At the time of the k-th invocation, we have

and
Ck|k-1, which were computed from the (k−1)-st invocation, input in b and covb, respectively. During the k-th invocation, function imsls_f_kalman computes the filtered estimate

along with Ck|k. These quantities are given by the update equations:
where

and where
Here, vk (stored in v) is the one-step-ahead prediction error, and σ2Hk is the variance-covariance matrix for vk. Hk is stored in covv. The “start-up values” needed on the first invocation of imsls_f_kalman are

and C 1|0 = Q1 input via b and covb, respectively. Computations for the k-th invocation are completed by imsls_f_kalman computing the one-step-ahead estimate

along with Ck+1|k given by the prediction equations:
If both the filtered estimates and one-step-ahead estimates are needed by the user at each time point, imsls_f_kalman can be invoked twice for each time point—first without IMSLS_T and IMSLS_Q to produce

and Ck|k, and second without IMSLS_UPDATE to produce
and Ck+1|k (Without IMSLS_T and IMSLS_Q, the prediction equations are skipped. Without IMSLS_UPDATE, the update equations are skipped.).
Often, one desires the estimate of the state vector more than one-step-ahead, i.e., an estimate of

is needed where k > j + 1. At time j, imsls_f_kalman is invoked with IMSLS_UPDATE to compute

Subsequent invocations of imsls_f_kalman without IMSLS_UPDATE can compute
Computations for
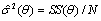
and Ck|j assume the variance-covariance matrices of the errors in the observation equation and state equation are known up to an unknown positive scalar multiplier, σ2. The maximum likelihood estimate of σ2 based on the observations y1, y2, …, ym, is given by

where

N and SS are the input/output arguments n and ss.
If σ2 is known, the Rks and Qks can be input as the variance-covariance matrices exactly. The earlier discussion is then simplified by letting σ2 = 1.
In practice, the matrices Tk, Qk, and Rk are generally not completely known. They may be known functions of an unknown parameter vector θ. In this case, imsls_f_kalman can be used in conjunction with an optimization program (see function imsl_f_min_uncon_multivar, IMSL C/Math/Library, “Optimization”) to obtain a maximum likelihood estimate of θ. The natural logarithm of the likelihood function for y1, y2, …, ym differs by no more than an additive constant from
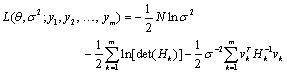
(Harvey 1981, page 14, equation 2.21).
Here,

(stored in alndet) is the natural logarithm of the determinant of V where σ2V is the variance-covariance matrix of the observations.
Minimization of −2L(θ, σ2; y1, y2, …, ym) over all θ and σ2 produces maximum likelihood estimates. Equivalently, minimization of −2Lc(θ;y1, y2, …, ym) where

produces maximum likelihood estimates

The minimization of −2Lc(θ;y1, y2, …, ym) instead of −2L(θ, σ2; y1, y2, …, ym), reduces the dimension of the minimization problem by one. The two optimization problems are equivalent since
minimizes −2L(θ, σ2; y1, y2, …, ym) for all θ, consequently,

can be substituted for σ2 in L(θ, σ2; y1, y2, …, ym) to give a function that differs by no more than an additive constant from Lc(θ;y1, y2, …, ym).
The earlier discussion assumed Hk to be nonsingular. If Hk is singular, a modification for singular distributions described by Rao (1973, pages 527–528) is used. The necessary changes in the preceding discussion are as follows:
•
Replace  by a generalized inverse.
by a generalized inverse.
• Replace det(Hk) by the product of the nonzero eigenvalues of Hk.
•
Replace N by 
Maximum likelihood estimation of parameters in the Kalman filter is discussed by Sallas and Harville (1988) and Harvey (1981, pages 111–113).
Example 1
Function imsls_f_kalman is used to compute the filtered estimates and one-step-ahead estimates for a scalar problem discussed by Harvey (1981, pages 116-117). The observation equation and state equation are given by
where the eks are identically and independently distributed normal with mean 0 and variance σ2, the wks are identically and independently distributed normal with mean 0 and variance 4σ2, and b1is distributed normal with mean 4 and variance 16σ2. Two invocations of imsls_f_kalman are needed for each time point in order to compute the filtered estimate and the one-step-ahead estimate. The first invocation does not use the optional arguments IMSLS_T and IMSLS_Q so that the prediction equations are skipped in the computations. The update equations are skipped in the computations in the second invocation.
This example also computes the one-step-ahead prediction errors. Harvey (1981, page 117) contains a misprint for the value v4 that he gives as 1.197. The correct value of v4 = 1.003 is computed by imsls_f_kalman.
#include <stdio.h>
#include <imsls.h>
#define NB 1
#define NOBS 4
#define NY 1
int main()
{
int nb = NB, nobs = NOBS, ny = NY;
int ldcovb, ldcovv, ldq, ldr, ldt, ldz;
int i, iq, it, n, nout;
float alndet, b[NB], covb[NB][NB], covv[NY][NY],
q[NB][NB], r[NY][NY], ss,
t[NB][NB], tol, v[NY], y[NY], z[NY][NB];
float ydata[] = {4.4, 4.0, 3.5, 4.6};
z[0][0] = 1.0;
r[0][0] = 1.0;
q[0][0] = 4.0;
t[0][0] = 1.0;
b[0] = 4.0;
covb[0][0] = 16.0;
/* Initialize arguments for initial call to imsls_f_kalman. */
n = 0;
ss = 0.0;
alndet = 0.0;
printf("k/j b covb n ss alndet v covv\n");
for (i = 0; i < nobs; i++) {
/* Update */
y[0] = ydata[i];
imsls_f_kalman(nb, b, (float*)covb, &n, &ss, &alndet,
IMSLS_UPDATE, ny, y, z, r,
IMSLS_V_USER, v,
IMSLS_COVV_USER, covv,
0);
printf("%d/%d %8.3f %8.3f %d %8.3f %8.3f %8.3f %8.3f\n",
i, i, b[0], covb[0][0], n, ss, alndet, v[0], covv[0][0]);
/* Prediction */
imsls_f_kalman(nb, b, (float*)covb, &n, &ss, &alndet,
IMSLS_T, t,
IMSLS_Q, q,
0);
printf("%d/%d %8.3f %8.3f %d %8.3f %8.3f %8.3f %8.3f\n",
i+1, i, b[0], covb[0][0], n, ss, alndet, v[0], covv[0][0]);
}
}
Output
k/j b covb n ss alndet v covv
0/0 4.376 0.941 1 0.009 2.833 0.400 17.000
1/0 4.376 4.941 1 0.009 2.833 0.400 17.000
1/1 4.063 0.832 2 0.033 4.615 -0.376 5.941
2/1 4.063 4.832 2 0.033 4.615 -0.376 5.941
2/2 3.597 0.829 3 0.088 6.378 -0.563 5.832
3/2 3.597 4.829 3 0.088 6.378 -0.563 5.832
3/3 4.428 0.828 4 0.260 8.141 1.003 5.829
4/3 4.428 4.828 4 0.260 8.141 1.003 5.829
Example 2
Function imsls_f_kalman is used with function imsl_f_min_uncon_multivar, (see IMSL C/Math/Library, “Optimization”) to find a maximum likelihood estimate of the parameter θ in a MA(1) time series represented by yk = εk − θεk-1. Function imsls_f_random_arma (see IMSL C/Stat/Library, “Random Number Generation”) is used to generate 200 random observations from an MA(1) time series with θ = 0.5 and σ2 = 1.
The MA(1) time series is cast as a state-space model of the following form (see Harvey 1981, pages 103–104, 112):
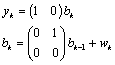
where the two-dimensional wks are independently distributed bivariate normal with mean 0 and variance σ2 Qk and
The warning error that is printed as part of the output is not serious and indicates that imsl_f_min_uncon_multivar (See Chapter 8, “Optimization” in the math manual) is generally used for multi-parameter minimization.
#include <stdio.h>
#include <math.h>
#include <imsls.h>
#define NOBS 200
#define NTHETA 1
#define NB 2
#define NY 1
float fcn(int ntheta, float theta[]);
float *ydata;
int main ()
{
int lagma[1];
float pma[1];
float *theta;
imsls_random_seed_set(123457);
pma[0] = 0.5;
lagma[0] = 1;
ydata = imsls_f_random_arma(200, 0, NULL, 1, pma,
IMSLS_ACCEPT_REJECT_METHOD,
IMSLS_NONZERO_MALAGS, lagma,
0);
theta = imsl_f_min_uncon_multivar(fcn, NTHETA, 0);
printf("* * * Final Estimate for THETA * * *\n");
printf("Maximum likelihood estimate, THETA = %f\n", theta[0]);
}
float fcn(int ntheta, float theta[])
{
int i, n;
float res, ss, alndet;
float t[] = {0.0, 1.0, 0.0, 0.0};
float z[] = {1.0, 0.0};
float q[NB][NB], r[NY][NY], b[NB], covb[NB][NB], y[NY];
if (fabs(theta[0]) > 1.0) {
res = 1.0e10;
} else {
q[0][0] = 1.0;
q[0][1] = -theta[0];
q[1][0] = -theta[0];
q[1][1] = theta[0]*theta[0];
r[0][0] = 0.0;
b[0] = 0.0;
b[1] = 0.0;
covb[0][0] = 1.0 + theta[0]*theta[0];
covb[0][1] = -theta[0];
covb[1][0] = -theta[0];
covb[1][1] = theta[0]*theta[0];
n = 0;
ss = 0.0;
alndet = 0.0;
for (i = 0; i<NOBS; i++) {
y[0] = ydata[i];
imsls_f_kalman(NB, b, (float*)covb, &n, &ss, &alndet,
IMSLS_UPDATE, NY, y, z, r,
IMSLS_Q, q,
IMSLS_T, t,
0);
}
res = n*log(ss/n) + alndet;
}
return(res);
}
Output
*** WARNING_IMMEDIATE Error from imsl_f_min_uncon_multivar. This routine
*** may be inefficient for a problem of size "n" = 1.
*** WARNING_IMMEDIATE Error from imsl_f_min_uncon_multivar. The last global
*** step failed to locate a lower point than the current X value.
*** The current X may be an approximate local minimizer and no more
*** accuracy is possible or the step tolerance may be too large
*** where "step_tol" = 2.422181e-05 is given.
* * * Final Estimate for THETA * * *
Maximum likelihood estimate, THETA = 0.453256