Computes the sample autocorrelation function of a stationary time series.
For a list of all members of this type, see AutoCorrelation Members.
System.Object
Imsl.Stat.AutoCorrelation
Thread Safety
Public static (Shared in Visual Basic) members of this type are safe for multithreaded operations. Instance members are not guaranteed to be thread-safe.
Remarks
AutoCorrelation estimates the autocorrelation function of a stationary time series given a sample of n observations ![]() for
for ![]() .
.
Let
where K = maximumLag. Note that ![]() is an estimate of the sample variance. The autocorrelation function
is an estimate of the sample variance. The autocorrelation function ![]() is estimated by
is estimated by
Note that ![]() by definition.
by definition.
The standard errors of sample autocorrelations may be optionally computed according to the GetStandardErrors method argument stderrMethod. One method (Bartlett 1946) is based on a general asymptotic expression for the variance of the sample autocorrelation coefficient of a stationary time series with independent, identically distributed normal errors. The theoretical formula is
where ![]() assumes
assumes ![]() is unknown. For computational purposes, the autocorrelations
is unknown. For computational purposes, the autocorrelations ![]() are replaced by their estimates
are replaced by their estimates ![]() for
for ![]() , and the limits of summation are bounded because of the assumption that
, and the limits of summation are bounded because of the assumption that ![]() for all
for all ![]() such that
such that ![]() .
.
A second method (Moran 1947) utilizes an exact formula for the variance of the sample autocorrelation coefficient of a random process with independent, identically distributed normal errors. The theoretical formula is
where ![]() is assumed to be equal to zero. Note that this formula does not depend on the autocorrelation function.
is assumed to be equal to zero. Note that this formula does not depend on the autocorrelation function.
The method GetPartialAutoCorrelations returns the estimated partial autocorrelations of the stationary time series given K = maximumLag sample autocorrelations ![]() for k=0,1,...,K. Consider the AR(k) process defined by
for k=0,1,...,K. Consider the AR(k) process defined by
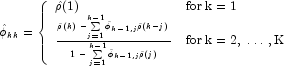
This procedure is sensitive to rounding error and should not be used if the parameters are near the nonstationarity boundary. A possible alternative would be to estimate ![]() for successive AR(k) models using least or maximum likelihood. Based on the hypothesis that the true process is AR(p), Box and Jenkins (1976, page 65) note
for successive AR(k) models using least or maximum likelihood. Based on the hypothesis that the true process is AR(p), Box and Jenkins (1976, page 65) note
See Box and Jenkins (1976, pages 82-84) for more information concerning the partial autocorrelation function.
Requirements
Namespace: Imsl.Stat
Assembly: ImslCS (in ImslCS.dll)
See Also
AutoCorrelation Members | Imsl.Stat Namespace | Example