
Computes the LU factorization of a general sparse
matrix by a column method and solves the real sparse linear system of equations
 .
.
Synopsis
#include <imsl.h>
float *imsl_f_superlu (int n, int nz, Imsl_f_sparse_elem a[], float b[],…,0)
void imsl_f_superlu_factor_free (Imsl_f_super_lu_factor *factor)
The type double functions are imsl_d_superlu and imsl_d_superlu_factor_free.
Required Arguments
int n
(Input)
The order of the input matrix.
int nz
(Input)
Number of nonzeros in the
matrix.
Imsl_f_sparse_elem a[] (Input)
Array
of length nz containing the location and value of each nonzero
entry in the matrix. See the main “Introduction” chapter of this manual for an
explanation of the Imsl_f_sparse_elem
structure.
float b[]
(Input)
Array of length n containing the right-hand side.
Return Value
A pointer to the solution  of the sparse linear system . To release this space, use imsl_free.
If no solution was computed, then NULL
is returned.
of the sparse linear system . To release this space, use imsl_free.
If no solution was computed, then NULL
is returned.
Synopsis with Optional Arguments
#include <imsl.h>
float *imsl_f_superlu (int n, int nz, Imsl_f_sparse_elem a[], float b[],
IMSL_EQUILIBRATE, int equilibrate,
IMSL_COLUMN_ORDERING_METHOD, Imsl_col_ordering method,
IMSL_COLPERM_VECTOR, int permc[],
IMSL_TRANSPOSE, int transpose,
IMSL_ITERATIVE_REFINEMENT, int refine,
IMSL_FACTOR_SOLVE, int factsol,
IMSL_DIAG_PIVOT_THRESH, double diag_pivot_thresh,
IMSL_SYMMETRIC_MODE, int symm_mode,
IMSL_PERFORMANCE_TUNING, int sp_ienv[],
IMSL_CSC_FORMAT, int HB_col_ptr[], int HB_row_ind [],float HB_values[],
IMSL_CSC_FORMAT, int HB_col_ptr[], int HB_row_ind[], float HB_values[],
IMSL_SUPPLY_SPARSE_LU_FACTOR, Imsl_f_super_lu_factor lu_factor_supplied,
IMSL_RETURN_SPARSE_LU_FACTOR, Imsl_f_super_lu_factor *lu_factor_returned,
IMSL_CONDITION, float *condition,
IMSL_PIVOT_GROWTH_FACTOR, float *recip_pivot_growth,
IMSL_FORWARD_ERROR_BOUND, float *ferr,
IMSL_BACKWARD_ERROR, float *berr,
IMSL_RETURN_USER, float x[],
0)
Optional Arguments
IMSL_EQUILIBRATE,
int equilibrate
(Input)
Specifies if the input matrix A should be equilibrated before
factorization.
|
equilibrate |
Description |
|
0 |
Do not equilibrate A before factorization |
|
1 |
Equilibrate A before factorization. |
Default: equilibrate = 0
IMSL_COLUMN_ORDERING_METHOD,
Imsl_col_ordering method
(Input)
The column ordering method used to preserve sparsity prior to
the factorization process. Select the ordering method by setting method to one of the
following:
|
method |
Description |
|
IMSL_NATURAL |
Natural ordering, i.e.the column ordering of the input matrix. |
|
IMSL_MMD_ATA |
Minimum degree ordering on the structure of |
|
IMSL_MMD_AT_PLUS_A |
Minimum degree ordering on the structure of |
|
IMSL_COLAMD |
Column approximate minimum degree ordering. |
|
IMSL_PERMC |
Use ordering given in permutation vector permc, which is input by the user through optional argument IMSL_COLPERM_VECTOR. Vector permc is a permutation of the numbers 0,1,…,n-1. |


Default: method = IMSL_COLAMD
IMSL_COLPERM_VECTOR, int permc[]
(Input)
Array of length n which defines the
permutation matrix  before postordering.
This argument is required if IMSL_COLUMN_ORDERING_METHOD
with method = IMSL_PERMC
is used. Otherwise, it is ignored.
before postordering.
This argument is required if IMSL_COLUMN_ORDERING_METHOD
with method = IMSL_PERMC
is used. Otherwise, it is ignored.
IMSL_TRANSPOSE,
int transpose
(Input)
Indicates if the transposed problem  is to be solved. This
option can be used in conjunction with either of the options that supply the
factorization.
is to be solved. This
option can be used in conjunction with either of the options that supply the
factorization.
|
transpose |
Description |
|
0 |
Solve |
|
1 |
Solve |
Default: transpose = 0
IMSL_ITERATIVE_REFINEMENT,
int refine
(Input)
Indicates if iterative refinement is desired.
|
refine |
Description |
|
0 |
No iterative refinement. |
|
1 |
Do iterative refinement. |
Default: refine = 1
IMSL_FACTOR_SOLVE,
int factsol
(Input)
Indicates if the
LU factorization, the solution of a linear system or both are to be
computed.
|
factsol |
Description |
|
0 |
Compute the LU factorization of the input matrix
A and solve the system |
|
1 |
Only compute the LU factorization of the input
matrix and return. |
|
2 |
Only solve |
Default: factsol = 0
IMSL_DIAG_PIVOT_THRESH,
double diag_pivot_thresh
(Input)
Specifies the threshold used for a diagonal entry to be an acceptable
pivot, 0.0  diag_pivot_thresh 1.0.
diag_pivot_thresh 1.0.
Default:
diag_pivot_thresh = 1.0
IMSL_SYMMETRIC_MODE,
int symm_mode
(Input)
Indicates if the
symmetric mode option is to be used. This mode should be applied if the input
matrix  is diagonally dominant or nearly
so. The user should then define a small diagonal pivot threshold (e.g. 0.0 or
0.01) via option IMSL_DIAG_PIVOT_THRESH
and choose an
is diagonally dominant or nearly
so. The user should then define a small diagonal pivot threshold (e.g. 0.0 or
0.01) via option IMSL_DIAG_PIVOT_THRESH
and choose an  -based column permutation algorithm
(e.g. column permutation method IMSL_MMD_AT_PLUS_A).
-based column permutation algorithm
(e.g. column permutation method IMSL_MMD_AT_PLUS_A).
|
symm_mode |
Description |
|
0 |
Do not use symmetric mode option. |
|
1 |
Use symmetric mode option. |
Default: symm_mode = 0
IMSL_PERFORMANCE_TUNING, int sp_ienv[]
(Input)
Array of length 6 containing positive parameters that allow
the user to tune the performance of the matrix factorization algorithm.
|
i |
Description of sp_ienv[i] |
|
0 |
The panel size. |
|
1 |
The relaxation parameter to control supernode
amalgamation. |
|
2 |
The maximum allowable size for a
supernode. |
|
3 |
The minimum row dimension to be used for 2D blocking.
|
|
4 |
The minimum column dimension to be used for 2D
blocking. |
|
5 |
The estimated fill factor for L and U,
compared to A. |
IMSL_CSC_FORMAT, int HB_col_ptr[], int HB_row_ind[], float HB_values[]
(Input)
Accept the coefficient matrix in compressed sparse column (CSC)
format. See the main “Introduction” chapter of this manual for a discussion of
this storage scheme.
IMSL_SUPPLY_SPARSE_LU_FACTOR,
Imsl_f_super_lu_factor lu_factor_supplied
(Input)
A structure of
type Imsl_f_super_lu_factor containing the
LU factorization of the input matrix computed with the IMSL_RETURN_SPARSE_LU_FACTOR
option. See the Description section
for a definition of this structure. To free the memory allocated within this
structure, use function imsl_f_superlu_factor_free.
IMSL_RETURN_SPARSE_LU_FACTOR,
Imsl_f_super_lu_factor *lu_factor_returned
(Output)
The
address of a structure of type Imsl_f_super_lu_factor containing the LU
factorization of the input matrix. See the Description section for a definition
of this structure. To free the memory allocated within this structure, use
function imsl_f_superlu_factor_free.
IMSL_CONDITION,
float *condition
(Output)
The estimate of the reciprocal condition number of
matrix a after
equilibration (if done).
IMSL_PIVOT_GROWTH_FACTOR,
float *recip_pivot_growth
(Output)
The
reciprocal pivot growth factor
 .
.
If recip_pivot_growth is much less than 1, the stability of the LU factorization could be poor.
IMSL_FORWARD_ERROR_BOUND, float *ferr
(Output)
The estimated forward error bound for the solution vector x.
This option requires argument IMSL_ITERATIVE_REFINEMENT
set to 1.
IMSL_BACKWARD_ERROR, float *berr
(Output)
The componentwise relative backward error of the solution vector
x. This option requires argument IMSL_ITERATIVE_REFINEMENT
set to 1.
IMSL_RETURN_USER,
float x[]
(Output)
A user-allocated array of length n containing the
solution x
of the linear system.
Description
Consider the sparse linear system of equations
.
Here, is a general square,
nonsingular  by sparse matrix, and and
by sparse matrix, and and  are vectors of length . All entries in , and are of real type.
are vectors of length . All entries in , and are of real type.
Gaussian elimination, applied to the system above, can be shortly described as follows:
1. Compute a
triangular factorization  . Here,
. Here,  and
and  are positive definite diagonal
matrices to equilibrate the system and
are positive definite diagonal
matrices to equilibrate the system and  and are permutation matrices to
ensure numerical stability and preserve sparsity.
and are permutation matrices to
ensure numerical stability and preserve sparsity.  is a unit lower triangular matrix
and
is a unit lower triangular matrix
and  is an upper triangular
matrix.
is an upper triangular
matrix.
2. Solve
by evaluating

This is done
efficiently by multiplying from right to left in the last expression: Scale the
rows of by . Multiplying  means permuting the rows of
means permuting the rows of  . Multiplying
. Multiplying  means solving the triangular
system of equations with matrix by substitution.
Similarly, multiplying
means solving the triangular
system of equations with matrix by substitution.
Similarly, multiplying  means solving the triangular
system with .
means solving the triangular
system with .
Function imsl_f_superlu
handles step 1 above by default or if optional argument IMSL_FACTOR_SOLVE
is used and set to 1. More precisely, before is solved, the following steps
are performed:
1.
Equilibrate matrix , i.e. compute diagonal matrices and so that  is “better conditioned” than
, i.e.
is “better conditioned” than
, i.e.  is less sensitive to
perturbations in
is less sensitive to
perturbations in  than
than  is to perturbations in .
is to perturbations in .
2. Order the
columns of to increase the sparsity of the
computed and factors, i.e. replace by  where is a column permutation
matrix.
where is a column permutation
matrix.
3. Compute
the LU factorization of . For numerical stability, the
rows of are eventually permuted through
the factorization process by scaled partial pivoting, leading to the
decomposition  . The LU factorization is done
by a left looking supernode-panel algorithm with 2-D blocking. See Demmel,
Eisenstat, Gilbert et al. (1999) for further information on this technique.
. The LU factorization is done
by a left looking supernode-panel algorithm with 2-D blocking. See Demmel,
Eisenstat, Gilbert et al. (1999) for further information on this technique.
4. Compute the reciprocal pivot growth factor
 ,
,
where  and
and  denote the
denote the  -th column of matrices
-th column of matrices  and , respectively.
and , respectively.
5. Estimate
the reciprocal of the condition number of matrix .
During the solution process, this information is used to perform the following steps:
1. Solve the
system using the computed triangular L
and U factors.
2. Iteratively refine the solution, again using the computed triangular factors. This is equivalent to Newton’s method.
3. Compute
forward and backward error bounds for the solution vector .
Some of the steps mentioned above are optional. Their settings can be controlled by the appropriate optional arguments of function imsl_f_superlu.
Function imsl_f_superlu uses a supernodal storage scheme for the LU factorization of matrix A. The factorization is contained in structure Imsl_f_super_lu_factor and two sub-structures. Following is a short description of these structures:
typedef struct{
int nnz; /* Number of nonzeros in the matrix */
float *nzval;
/* Array of nonzero values
packed by
column
*/
int *rowind; /* Array of row indices of the nonzeros */
int
*colptr;
/* colptr[j] stores the location in
nzval[]
and rowind[] which starts column j.
It
has ncol+1 entries, and
colptr[ncol]
points to the first free location
in
arrays nzval[] and rowind[]. */
} Imsl_f_hb_format;
typedef struct{
int
nnz;
/* Number of nonzeros in the
supernodal
matrix */
int nsuper; /* Index of the last supernode */
float
*nzval;
/* Array of nonzero values packed by
column
*/
int
*nzval_colptr; /* Array of length
ncol+1;
nzval_colptr[j]
stores the location in nzval which
starts
column j. nzval_colptr[ncol] points
to
the first free location in
arrays
nzval[] and nzval_colptr[]. */
int
*rowind;
/* Array of compressed row indices
of
rectangular supernodes */
int
*rowind_colptr; /* Array of length
ncol+1;
rowind_colptr[sup_to_col[s]] stores
the
location in rowind[] which
starts
all columns in supernode s,
and
rowind_colptr[ncol] points to the
first
free location in rowind[]. */
int
*col_to_sup; /* Array of
length ncol+1; col_to_sup[j]
is
the supernode number to which column
j
belongs. Only the first ncol entries
in
col_to_sup[] are defined. */
int
*sup_to_col; /* Array of
length ncol+1;
sup_to_col[s]
points
to the starting column of the
s-th
supernode. Only the first
nsuper+2
entries in sup_to_col[] are defined,
and
sup_to_col[nsuper+1] = ncol+1. */
} Imsl_f_sc_format;
typedef struct{
int nrow; /* number of rows of matrix A */
int ncol; /* number of columns of matrix A */
int equilibration_method; /* The method used to equilibrate A:
0 – No equilibration
1 – Row equilibration.
2 – Column equilibration
3 – Both row and column equilibration */
float *rowscale; /* Array of length nrow containing the row
scale factors for A */
float
*columnscale; /* Array of length ncol
containing
the
column scale factors for A */
int
*rowperm;
/* Row permutation array of length
nrow
describing the row permutation matrix
Pr
*/
int *colperm; /* Column permutation array of length ncol
describing the column permutation
matrix
Pc */
Imsl_f_hb_format
*U; /* The part of the U factor of A outside
the
supernodal blocks, stored in
Harwell-
Boeing format */
Imsl_f_sc_format
*L; /* The L factor of A, stored in
supernodal
format as block lower triangular
matrix
*/
} Imsl_f_super_lu_factor;
Structure Imsl_d_super_lu_factor and its two sub-structures are defined similarly by replacing float by double, Imsl_f_hb_format by Imsl_d_hb_format and Imsl_f_sc_format by Imsl_d_sc_format in their definitions.
For a definition of supernodes and its use in sparse LU factorization, see the SuperLU Users’ guide (1999) and J.W. Demmel, S. C. Eisenstat et al. (1999).
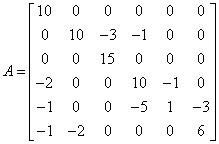
As an example, consider the matrix
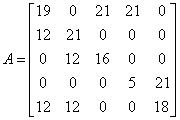 ,
,
taken from the SuperLU Users’ guide (1999).
Factorization of this matrix via imsl_f_superlu using natural column ordering, no equilibration and setting sp_ienv[1] from its default value 5 to 1 results in the following LU decomposition:
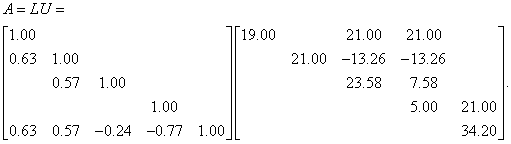
Considering the filled matrix F (I denoting the identity matrix)
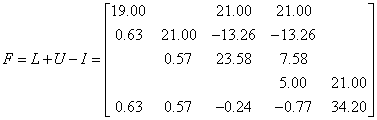 ,
,
the supernodal structure of the factors of matrix A can be described by
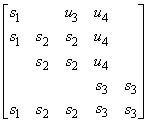 ,
,
where  denotes a nonzero entry in the
denotes a nonzero entry in the
 th supernode and
th supernode and  denotes a nonzero entry in the th column of
denotes a nonzero entry in the th column of  outside the supernodal block.
outside the supernodal block.
Therefore, in a supernodal storage scheme the supernodal part of matrix F is stored as the lower block-diagonal matrix
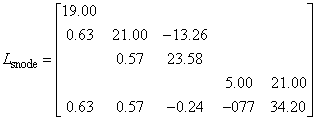
and the part outside the supernodes as the upper triangular matrix
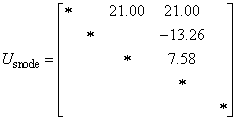 .
.
This is in accordance with the output for structure Imsl_f_super_lu_factor:
Equilibration method: 0
Scale vectors:
rowscale: 1.000000 1.000000
1.000000 1.000000 1.000000
columnscale: 1.000000
1.000000 1.000000 1.000000 1.000000
Permutation vectors:
colperm: 0 1 2 3 4
rowperm: 0
1 2 3 4
Harwell-Boeing matrix U:
nrow 5, ncol 5, nnz 11
nzval: 21.000000 -13.263157 7.578947 21.000000
rowind: 0 1 2 0
colptr: 0 0 0 1 4 4
Supernodal matrix L:
nrow 5, ncol 5, nnz 11, nsuper 2
nzval:
0 0 1.900000e+001
1 0 6.315789e-001
4 0 6.315789e-001
1 1 2.100000e+001
2 1 5.714286e-001
4 1 5.714286e-001
1 2 -1.326316e+001
2 2 2.357895e+001
4 2 -2.410714e-001
3 3 5.000000e+000
4 3 -7.714285e-001
3 4 2.100000e+001
4 4 3.420000e+001
nzval_colptr: 0 3 6 9 11 13
rowind: 0 1 4 1 2 4 3 4
rowind_colptr: 0 3 6 6 8 8
col_to_sup: 0 1 1 2 2
sup_to_col: 0 1 3 5
Function imsl_f_superlu is based on the SuperLU code written by Demmel, Gilbert, Li et al. For more detailed explanations of the factorization and solve steps, see the SuperLU User’s Guide (1999).
Copyright (c) 2003, The Regents of the University of California, through Lawrence Berkeley National Laboratory (subject to receipt of any required approvals from U.S. Dept. of Energy)
All rights reserved.
Redistribution and use in source and binary forms, with or without modification, are permitted provided that the following conditions are met:
(1) Redistributions of source code must retain the above copyright notice, this list of conditions and the following disclaimer.
(2) Redistributions in binary form must reproduce the above copyright notice, this list of conditions and the following disclaimer in the documentation and/or other materials provided with the distribution.
(3) Neither the name of Lawrence Berkeley National Laboratory, U.S. Dept. of Energy nor the names of its contributors may be used to endorse or promote products derived from this software without specific prior written permission.
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS “AS IS” AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
Examples
Example 1
The LU factorization of the sparse 6×6 matrix
is computed.
Let  , so that
, so that  and
and 
The LU factorization of A is used to solve
the sparse linear systems  and
and  .
.
#include <imsl.h>
int main(){
Imsl_f_sparse_elem a[] = { 0, 0, 10.0,
1, 1, 10.0,
1, 2, -3.0,
1, 3, -1.0,
2, 2, 15.0,
3, 0, -2.0,
3, 3, 10.0,
3, 4, -1.0,
4, 0, -1.0,
4, 3, -5.0,
4, 4, 1.0,
4, 5, -3.0,
5, 0, -1.0,
5, 1, -2.0,
5, 5, 6.0};
float b1[] = {10.0, 7.0, 45.0, 33.0, -34.0, 31.0};
float b2[] = { -9.0, 8.0, 39.0, 13.0, 1.0, 21.0 };
int n = 6, nz = 15;
float *x = NULL;
x = imsl_f_superlu (n, nz, a, b1, 0);
imsl_f_write_matrix ("solution to A*x = b1", 1, n, x, 0);
imsl_free (x);
x = imsl_f_superlu (n, nz, a, b2, IMSL_TRANSPOSE, 1, 0);
imsl_f_write_matrix ("solution to A^T*x = b2", 1, n, x, 0);
imsl_free (x);
}
Output
solution to A*x = b
1 2 3 4 5 6
1 2 3 4 5 6
solution to A^T*x = b2
1 2 3 4 5 6
1 2 3 4 5 6
Example 2
This example uses the matrix A = E(1000,10) to show how the LU factorization of A can be used to solve a linear system with the same coefficient matrix A but different right-hand side. Maximum absolute errors are printed. After the computations, the space allocated for the LU factorization is freed via function imsl_f_superlu_factor_free.
#include <imsl.h>
int main(){
Imsl_f_sparse_elem *a;
Imsl_f_super_lu_factor lu_factor;
float *b, *x, *mod_five, *mod_ten;
float error_factor_solve, error_solve;
int n = 1000, c = 10;
int i, nz, index;
/* Get the coefficient matrix */
a = imsl_f_generate_test_coordinate (n, c, &nz, 0);
/* Set two different predetermined solutions */
mod_five = (float*) malloc (n*sizeof(*mod_five));
mod_ten = (float*) malloc (n*sizeof(*mod_ten));
for (i=0; i<n; i++) {
mod_five[i] = (float) (i % 5);
mod_ten[i] = (float) (i % 10);
}
/* Choose b so that x will approximate mod_five */
b = imsl_f_mat_mul_rect_coordinate ("A*x",
IMSL_A_MATRIX, n, n, nz, a,
IMSL_X_VECTOR, n, mod_five, 0);
/* Solve Ax = b */
x = imsl_f_superlu (n, nz, a, b,
IMSL_RETURN_SPARSE_LU_FACTOR, &lu_factor, 0);
/* Compute max absolute error */
error_factor_solve = imsl_f_vector_norm (n, x,
IMSL_SECOND_VECTOR, mod_five,
IMSL_INF_NORM, &index,
0);
imsl_free (mod_five);
imsl_free (b);
imsl_free (x);
/* Get new right hand side -- b = A * mod_ten */
b = imsl_f_mat_mul_rect_coordinate ("A*x",
IMSL_A_MATRIX, n, n, nz, a,
IMSL_X_VECTOR, n, mod_ten,
0);
/* Use the previously computed factorization
to solve Ax = b */
x = imsl_f_superlu (n, nz, a, b,
IMSL_SUPPLY_SPARSE_LU_FACTOR, lu_factor,
IMSL_FACTOR_SOLVE, 2,
0);
error_solve = imsl_f_vector_norm (n, x,
IMSL_SECOND_VECTOR, mod_ten,
IMSL_INF_NORM, &index,
0);
imsl_free (mod_ten);
imsl_free (b);
imsl_free (x);
imsl_free (a);
/* Free sparse LU structure */
imsl_f_superlu_factor_free (&lu_factor);
/* Print errors */
printf ("absolute error (factor/solve) = %e\n",
error_factor_solve);
printf ("absolute error (solve) = %e\n", error_solve);
}
Output
absolute error (factor/solve) = 1.835823e-005
absolute error (solve) = 2.002716e-005
Warning Errors
IMSL_ILL_CONDITIONED The input matrix is too ill-conditioned. An estimate of the reciprocal of its L1 condition number is “rcond” = #. The solution might not be accurate.
Fatal Errors
IMSL_SINGULAR_MATRIX The input matrix is singular.