Solves a (parameterized) system of differential equations with boundary conditions at two points, using a variable order, variable step size finite difference method with deferred corrections.
Required Arguments
FCNEQN —
User-supplied SUBROUTINE to evaluate
derivatives. The usage is CALL FCNEQN
(N, T,
Y, P, DYDT),
where
N – Number of
differential equations.
(Input)
T – Independent
variable, t.
(Input)
Y – Array of
size N
containing the dependent variable values, y(t).
(Input)
P – Continuation
parameter, p.
(Input)
See Comment
3.
DYDT – Array of
size N
containing the derivatives yʹ (t).
(Output)
The name FCNEQN must be
declared EXTERNAL in the
calling program.
FCNJAC —
User-supplied SUBROUTINE to evaluate
the Jacobian. The usage is CALL FCNJAC
(N, T,
Y, P, DYPDY),
where
N – Number of
differential equations.
(Input)
T – Independent
variable, t.
(Input)
Y – Array of
size N
containing the dependent variable values.
(Input)
P – Continuation
parameter, p. (Input)
See Comments
3.
DYPDY – N by N array containing the
partial derivatives ai, j = ∂ fi ∕ ∂ yj
evaluated at (t, y). The values ai,j are returned in DYPDY(i, j).
(Output)
The name FCNJAC
must be declared EXTERNAL in the
calling program.
FCNBC —
User-supplied SUBROUTINE to evaluate
the boundary conditions. The usage is
CALL FCNBC (N,
YLEFT, YRIGHT, P, H),
where
N – Number of
differential equations.
(Input)
YLEFT – Array of
size N
containing the values of the dependent
variable at the left endpoint.
(Input)
YRIGHT – Array
of size N
containing the values of the dependent
variable at the right endpoint.
(Input)
P – Continuation
parameter, p. (Input)
See Comment
3.
H – Array of
size N
containing the boundary condition residuals.
(Output)
The boundary conditions are defined by hi = 0; for i = 1, …, N. The left endpoint conditions must be defined first, then, the conditions involving both endpoints, and finally the right endpoint conditions.
The name FCNBC must be declared EXTERNAL in the calling program.
FCNPEQ — User-supplied SUBROUTINE to evaluate the derivative of yʹ with respect to the parameter p. The usage is
CALL FCNPEQ
(N, T,
Y, P, DYPDP),
where
N – Number of
differential equations.
(Input)
T – Dependent
variable, t.
(Input)
Y – Array of
size N
containing the dependent variable values.
(Input)
P – Continuation
parameter, p. (Input)
See Comment
3.
DYPDP – Array of
size N
containing the derivative of yʹ
evaluated at (t, y).
(Output)
The name FCNPEQ must be declared EXTERNAL in the calling program.
FCNPBC —
User-supplied SUBROUTINE to evaluate
the derivative of the boundary
conditions with respect
to the parameter p. The usage is
CALL FCNPBC
(N, YLEFT, YRIGHT, P, H),
where
N – Number of
differential equations.
(Input)
YLEFT – Array of
size N
containing the values of the dependent
variable at the left endpoint.
(Input)
YRIGHT – Array
of size N
containing the values of the dependent
variable at the right endpoint.
(Input)
P – Continuation
parameter, p. (Input)
See Comment
3.
H – Array of
size N
containing the derivative of fi with respect to p.
(Output)
The name FCNPBC must be declared EXTERNAL in the calling program.
NLEFT — Number of
initial conditions. (Input)
The value NLEFT must be greater
than or equal to zero and less than N.
NCUPBC — Number
of coupled boundary conditions. (Input)
The value NLEFT + NCUPBC must be greater
than zero and less than or equal to N.
TLEFT — The left endpoint. (Input)
TRIGHT — The right endpoint. (Input)
PISTEP — Initial
increment size for p. (Input)
If this value is zero, continuation will not be used in this problem. The
routines FCNPEQ
and FCNPBC will
not be called.
TOL — Relative
error control parameter. (Input)
The computations stop when
ABS(ERROR(J, I))/MAX(ABS(Y(J, I)), 1.0).LT.TOL for all J = 1, …, N and I = 1, …, NGRID. Here, ERROR(J, I) is the estimated
error in Y(J, I).
TINIT — Array of size NINIT containing the initial grid points. (Input)
YINIT — Array of size N by NINIT containing an initial guess for the values of Y at the points in TINIT. (Input)
LINEAR — Logical .TRUE. if the differential equations and the boundary conditions are linear. (Input)
MXGRID — Maximum number of grid points allowed. (Input)
NFINAL — Number of final grid points, including the endpoints. (Output)
TFINAL — Array of
size MXGRID
containing the final grid points. (Output)
Only the first NFINAL points are
significant.
YFINAL — Array of size N by MXGRID containing the values of Y at the points in TFINAL. (Output)
ERREST — Array of
size N.
(Output)
ERREST(J) is the estimated
error in Y(J).
Optional Arguments
N — Number of
differential equations. (Input)
Default: N = size (YINIT,1).
NINIT — Number of initial grid points, including
the endpoints. (Input)
It must be at least 4.
Default:
NINIT =
size (TINIT,1).
LDYINI — Leading
dimension of YINIT exactly as
specified in the dimension statement of the calling program.
(Input)
Default: LDYINI = size (YINIT,1).
PRINT — Logical
.TRUE. if intermediate
output is to be printed. (Input)
Default: PRINT = .FALSE.
LDYFIN — Leading
dimension of YFINAL exactly as
specified in the dimension statement of the calling program.
(Input)
Default: LDYFIN = size (YFINAL,1).
FORTRAN 90 Interface
Generic: CALL BVPFD (FCNEQN, FCNJAC, FCNBC, FCNPEQ, FCNPBC, NLEFT, NCUPBC, TLEFT, TRIGHT, PISTEP, TOL, TINIT, YINIT, LINEAR, MXGRID, NFINAL, TFINAL, YFINAL, ERREST [,…])
Specific: The specific interface names are S_BVPFD and D_BVPFD.
FORTRAN 77 Interface
Single: CALL BVPFD (FCNEQN, FCNJAC, FCNBC, FCNPEQ, FCNPBC, N, NLEFT, NCUPBC, TLEFT, TRIGHT, PISTEP, TOL, NINIT, TINIT, YINIT, LDYINI, LINEAR, PRINT, MXGRID, NFINAL, TFINAL, YFINAL, LDYFIN, ERREST)
Double: The double precision name is DBVPFD.
Description
The routine BVPFD is based on the subprogram PASVA3 by M. Lentini and V. Pereyra (see Pereyra 1978). The basic discretization is the trapezoidal rule over a nonuniform mesh. This mesh is chosen adaptively, to make the local error approximately the same size everywhere. Higher-order discretizations are obtained by deferred corrections. Global error estimates are produced to control the computation. The resulting nonlinear algebraic system is solved by Newton's method with step control. The linearized system of equations is solved by a special form of Gauss elimination that preserves the sparseness.
Comments
1. Workspace may be explicitly provided, if desired, by use of B2PFD/DB2PFD. The reference is:
CALL B2PFD (FCNEQN, FCNJAC, FCNBC, FCNPEQ, FCNPBC, N, NLEFT, NCUPBC, TLEFT, TRIGHT, PISTEP, TOL, NINIT, TINIT, YINIT, LDYINI, LINEAR, PRINT, MXGRID, NFINAL, TFINAL, YFINAL, LDYFIN, ERREST, RWORK, IWORK)
The additional arguments are as follows:
RWORK — Floating-point work array of size N(3N * MXGRID + 4N + 1) + MXGRID * (7N + 2).
IWORK — Integer work array of size 2N * MXGRID + N + MXGRID.
4 1 More than MXGRID grid points are needed to solve the problem.
3 3 Newton's method reached roundoff error level.
3. If the value of PISTEP is greater than zero, then the routine BVPFD assumes that the user has embedded the problem into a one-parameter family of problems:
such that for p = 0 the problem is simple. For p = 1, the original problem is recovered. The routine BVPFD automatically attempts to increment from p = 0 to p = 1. The value PISTEP is the beginning increment used in this continuation. The increment will usually be changed by routine BVPFD, but an arbitrary minimum of 0.01 is imposed.
4. The vectors TINIT and TFINAL may be the same.
5. The arrays YINIT and YFINAL may be the same.
Example 1
This example solves the third-order linear equation

subject to the boundary conditions y(0) =
y(2π) and yʹ(0) = yʹ(2π)
= 1. (Its solution is y = sin t.) To use BVPFD,
the problem is reduced to a system of first-order equations by defining
y1 = y, y2= yʹ
and y3 = y″.
The resulting system is
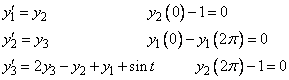
Note that there is one boundary condition at the left endpoint t = 0 and one boundary condition coupling the left and right endpoints. The final boundary condition is at the right endpoint. The total number of boundary conditions must be the same as the number of equations (in this case 3).
Note that since the parameter p is not used in the call to BVPFD, the routines FCNPEQ and FCNPBC are not needed. Therefore, in the call to BVPFD, FCNEQN and FCNBC were used in place of FCNPEQ and FCNPBC.
! SPECIFICATIONS FOR PARAMETERS
INTEGER LDYFIN, LDYINI, MXGRID, NEQNS, NINIT
PARAMETER (MXGRID=45, NEQNS=3, NINIT=10, LDYFIN=NEQNS, &
! SPECIFICATIONS FOR LOCAL VARIABLES
INTEGER I, J, NCUPBC, NFINAL, NLEFT, NOUT
REAL ERREST(NEQNS), PISTEP, TFINAL(MXGRID), TINIT(NINIT), &
TLEFT, TOL, TRIGHT, YFINAL(LDYFIN,MXGRID), &
! SPECIFICATIONS FOR INTRINSICS
! SPECIFICATIONS FOR SUBROUTINES
! SPECIFICATIONS FOR FUNCTIONS
EXTERNAL FCNBC, FCNEQN, FCNJAC
TINIT(I) = TLEFT + (I-1)*(TRIGHT-TLEFT)/FLOAT(NINIT-1)
CALL BVPFD (FCNEQN, FCNJAC, FCNBC, FCNEQN, FCNBC, NLEFT, &
NCUPBC, TLEFT, TRIGHT, PISTEP, TOL, TINIT, &
YINIT, LINEAR, MXGRID, NFINAL, &
WRITE (NOUT,99998) (I,TFINAL(I),(YFINAL(J,I),J=1,NEQNS),I=1, &
WRITE (NOUT,99999) (ERREST(J),J=1,NEQNS)
99997 FORMAT (4X, 'I', 7X, 'T', 14X, 'Y1', 13X, 'Y2', 13X, 'Y3')
99999 FORMAT (' Error estimates', 4X, 1P3E15.6)
SUBROUTINE FCNEQN (NEQNS, T, Y, P, DYDX)
! SPECIFICATIONS FOR ARGUMENTS
REAL T, P, Y(NEQNS), DYDX(NEQNS)
! SPECIFICATIONS FOR INTRINSICS
DYDX(3) = 2.0*Y(3) - Y(2) + Y(1) + SIN(T)
SUBROUTINE FCNJAC (NEQNS, T, Y, P, DYPDY)
! SPECIFICATIONS FOR ARGUMENTS
REAL T, P, Y(NEQNS), DYPDY(NEQNS,NEQNS)
SUBROUTINE FCNBC (NEQNS, YLEFT, YRIGHT, P, F)
! SPECIFICATIONS FOR ARGUMENTS
REAL P, YLEFT(NEQNS), YRIGHT(NEQNS), F(NEQNS)
Output
I
T
Y1
Y2
Y3
1 0.000000E+00 -1.123191E-04
1.000000E+00 6.242319E-05
2
3.490659E-01 3.419107E-01 9.397087E-01
-3.419580E-01
3 6.981317E-01
6.426908E-01 7.660918E-01 -6.427230E-01
4
1.396263E+00 9.847531E-01 1.737333E-01
-9.847453E-01
5 2.094395E+00 8.660529E-01
-4.998747E-01 -8.660057E-01
6
2.792527E+00 3.421830E-01 -9.395474E-01
-3.420648E-01
7 3.490659E+00 -3.417234E-01
-9.396111E-01 3.418948E-01
8 4.188790E+00
-8.656880E-01 -5.000588E-01
8.658733E-01
9 4.886922E+00 -9.845794E-01
1.734571E-01 9.847518E-01
10 5.585054E+00
-6.427721E-01 7.658258E-01
6.429526E-01
11 5.934120E+00 -3.420819E-01
9.395434E-01 3.423986E-01
12 6.283185E+00
-1.123186E-04 1.000000E+00 6.743190E-04
Error
estimates 2.840430E-04
1.792939E-04 5.588399E-04
Additional Examples
Example 2
In this example, the following nonlinear problem is solved:
y″ − y3 + (1 + sin2t) sin t = 0
with y(0) = y(π) = 0. Its solution is y = sin t. As in Example 1, this equation is reduced to a system of first-order differential equations by defining y1 = y and y2= yʹ. The resulting system is
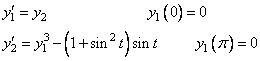
In this problem, there is one boundary condition at the left endpoint and one at the right endpoint; there are no coupled boundary conditions.
Note that since the parameter p is not used, in the call to BVPFD the routines FCNPEQ and FCNPBC are not needed. Therefore, in the call to BVPFD, FCNEQN and FCNBC were used in place of FCNPEQ and FCNPBC.
USE BVPFD_INT
USE UMACH_INT
USE CONST_INT
IMPLICIT NONE
! SPECIFICATIONS FOR PARAMETERS
INTEGER LDYFIN, LDYINI, MXGRID, NEQNS, NINIT
PARAMETER (MXGRID=45, NEQNS=2, NINIT=12, LDYFIN=NEQNS, &
LDYINI=NEQNS)
! SPECIFICATIONS FOR LOCAL VARIABLES
INTEGER I, J, NCUPBC, NFINAL, NLEFT, NOUT
REAL ERREST(NEQNS), PISTEP, TFINAL(MXGRID), TINIT(NINIT), &
TLEFT, TOL, TRIGHT, YFINAL(LDYFIN,MXGRID), &
YINIT(LDYINI,NINIT)
LOGICAL LINEAR, PRINT
! SPECIFICATIONS FOR INTRINSICS
INTRINSIC FLOAT
REAL FLOAT
! SPECIFICATIONS FOR FUNCTIONS
EXTERNAL FCNBC, FCNEQN, FCNJAC
! Set parameters
NLEFT = 1
NCUPBC = 0
TOL = .001
TLEFT = 0.0
TRIGHT = CONST('PI')
PISTEP = 0.0
PRINT = .FALSE.
LINEAR = .FALSE.
! Define TINIT and YINIT
DO 10 I=1, NINIT
TINIT(I) = TLEFT + (I-1)*(TRIGHT-TLEFT)/FLOAT(NINIT-1)
YINIT(1,I) = 0.4*(TINIT(I)-TLEFT)*(TRIGHT-TINIT(I))
YINIT(2,I) = 0.4*(TLEFT-TINIT(I)+TRIGHT-TINIT(I))
10 CONTINUE
! Solve problem
CALL BVPFD (FCNEQN, FCNJAC, FCNBC, FCNEQN, FCNBC, NLEFT, &
NCUPBC, TLEFT, TRIGHT, PISTEP, TOL, TINIT, &
YINIT, LINEAR, MXGRID, NFINAL, &
TFINAL, YFINAL, ERREST)
! Print results
CALL UMACH (2, NOUT)
WRITE (NOUT,99997)
WRITE (NOUT,99998) (I,TFINAL(I),(YFINAL(J,I),J=1,NEQNS),I=1, &
NFINAL)
WRITE (NOUT,99999) (ERREST(J),J=1,NEQNS)
99997 FORMAT (4X, 'I', 7X, 'T', 14X, 'Y1', 13X, 'Y2')
99998 FORMAT (I5, 1P3E15.6)
99999 FORMAT (' Error estimates', 4X, 1P2E15.6)
END
SUBROUTINE FCNEQN (NEQNS, T, Y, P, DYDT)
! SPECIFICATIONS FOR ARGUMENTS
INTEGER NEQNS
REAL T, P, Y(NEQNS), DYDT(NEQNS)
! SPECIFICATIONS FOR INTRINSICS
INTRINSIC SIN
REAL SIN
! Define PDE
DYDT(1) = Y(2)
DYDT(2) = Y(1)**3 - SIN(T)*(1.0+SIN(T)**2)
RETURN
END
SUBROUTINE FCNJAC (NEQNS, T, Y, P, DYPDY)
! SPECIFICATIONS FOR ARGUMENTS
INTEGER NEQNS
REAL T, P, Y(NEQNS), DYPDY(NEQNS,NEQNS)
! Define d(DYDT)/dY
DYPDY(1,1) = 0.0
DYPDY(1,2) = 1.0
DYPDY(2,1) = 3.0*Y(1)**2
DYPDY(2,2) = 0.0
RETURN
END
SUBROUTINE FCNBC (NEQNS, YLEFT, YRIGHT, P, F)
! SPECIFICATIONS FOR ARGUMENTS
INTEGER NEQNS
REAL P, YLEFT(NEQNS), YRIGHT(NEQNS), F(NEQNS)
! Define boundary conditions
F(1) = YLEFT(1)
F(2) = YRIGHT(1)
RETURN
END
Output
I
T
Y1
Y2
1 0.000000E+00 0.000000E+00
9.999277E-01
2 2.855994E-01
2.817682E-01 9.594315E-01
3
5.711987E-01 5.406458E-01
8.412407E-01
4 8.567980E-01
7.557380E-01 6.548904E-01
5
1.142397E+00 9.096186E-01
4.154530E-01
6 1.427997E+00
9.898143E-01 1.423307E-01
7
1.713596E+00 9.898143E-01 -1.423307E-01
8
1.999195E+00 9.096185E-01 -4.154530E-01
9
2.284795E+00 7.557380E-01 -6.548903E-01
10
2.570394E+00 5.406460E-01 -8.412405E-01
11
2.855994E+00 2.817683E-01 -9.594313E-01
12
3.141593E+00 0.000000E+00 -9.999274E-01
Error
estimates 3.906105E-05 7.124186E-05
Example 3
In this example, the following nonlinear problem is solved:
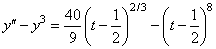
with y(0) = y(1) = π/2. As in the previous examples, this equation is reduced to a system of first-order differential equations by defining y1 = y and y2 = yʹ. The resulting system is
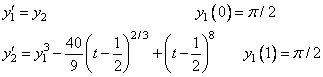
The problem is embedded in a family of problems by introducing the parameter p and by changing the second differential equation to
At p = 0, the problem is linear; and at p =
1, the original problem is recovered. The derivatives
∂yʹ/∂p must now be
specified in the subroutine FCNPEQ.
The derivatives ∂f/∂p are zero in FCNPBC.
USE BVPFD_INT
USE UMACH_INT
IMPLICIT NONE
! SPECIFICATIONS FOR PARAMETERS
INTEGER LDYFIN, LDYINI, MXGRID, NEQNS, NINIT
PARAMETER (MXGRID=45, NEQNS=2, NINIT=5, LDYFIN=NEQNS, &
LDYINI=NEQNS)
! SPECIFICATIONS FOR LOCAL VARIABLES
INTEGER NCUPBC, NFINAL, NLEFT, NOUT
REAL ERREST(NEQNS), PISTEP, TFINAL(MXGRID), TLEFT, TOL, &
XRIGHT, YFINAL(LDYFIN,MXGRID)
LOGICAL LINEAR, PRINT
! SPECIFICATIONS FOR SAVE VARIABLES
INTEGER I, J
REAL TINIT(NINIT), YINIT(LDYINI,NINIT)
SAVE I, J, TINIT, YINIT
! SPECIFICATIONS FOR FUNCTIONS
EXTERNAL FCNBC, FCNEQN, FCNJAC, FCNPBC, FCNPEQ
!
DATA TINIT/0.0, 0.4, 0.5, 0.6, 1.0/
DATA ((YINIT(I,J),J=1,NINIT),I=1,NEQNS)/0.15749, 0.00215, 0.0, &
0.00215, 0.15749, -0.83995, -0.05745, 0.0, 0.05745, 0.83995/
! Set parameters
NLEFT = 1
NCUPBC = 0
TOL = .001
TLEFT = 0.0
XRIGHT = 1.0
PISTEP = 0.1
PRINT = .FALSE.
LINEAR = .FALSE.
!
CALL BVPFD (FCNEQN, FCNJAC, FCNBC, FCNPEQ, FCNPBC, NLEFT, &
NCUPBC, TLEFT, XRIGHT, PISTEP, TOL, TINIT, &
YINIT, LINEAR, MXGRID, NFINAL,TFINAL, YFINAL, ERREST)
! Print results
CALL UMACH (2, NOUT)
WRITE (NOUT,99997)
WRITE (NOUT,99998) (I,TFINAL(I),(YFINAL(J,I),J=1,NEQNS),I=1, &
NFINAL)
WRITE (NOUT,99999) (ERREST(J),J=1,NEQNS)
99997 FORMAT (4X, 'I', 7X, 'T', 14X, 'Y1', 13X, 'Y2')
99998 FORMAT (I5, 1P3E15.6)
99999 FORMAT (' Error estimates', 4X, 1P2E15.6)
END
SUBROUTINE FCNEQN (NEQNS, T, Y, P, DYDT)
! SPECIFICATIONS FOR ARGUMENTS
INTEGER NEQNS
REAL T, P, Y(NEQNS), DYDT(NEQNS)
! Define PDE
DYDT(1) = Y(2)
DYDT(2) = P*Y(1)**3 + 40./9.*((T-0.5)**2)**(1./3.) - (T-0.5)**8
RETURN
END
SUBROUTINE FCNJAC (NEQNS, T, Y, P, DYPDY)
! SPECIFICATIONS FOR ARGUMENTS
INTEGER NEQNS
REAL T, P, Y(NEQNS), DYPDY(NEQNS,NEQNS)
! Define d(DYDT)/dY
DYPDY(1,1) = 0.0
DYPDY(1,2) = 1.0
DYPDY(2,1) = P*3.*Y(1)**2
DYPDY(2,2) = 0.0
RETURN
END
SUBROUTINE FCNBC (NEQNS, YLEFT, YRIGHT, P, F)
USE CONST_INT
! SPECIFICATIONS FOR ARGUMENTS
INTEGER NEQNS
REAL P, YLEFT(NEQNS), YRIGHT(NEQNS), F(NEQNS)
! SPECIFICATIONS FOR LOCAL VARIABLES
REAL PI
! Define boundary conditions
PI = CONST('PI')
F(1) = YLEFT(1) - PI/2.0
F(2) = YRIGHT(1) - PI/2.0
RETURN
END
SUBROUTINE FCNPEQ (NEQNS, T, Y, P, DYPDP)
! SPECIFICATIONS FOR ARGUMENTS
INTEGER NEQNS
REAL T, P, Y(NEQNS), DYPDP(NEQNS)
! Define d(DYDT)/dP
DYPDP(1) = 0.0
DYPDP(2) = Y(1)**3
RETURN
END
SUBROUTINE FCNPBC (NEQNS, YLEFT, YRIGHT, P, DFDP)
! SPECIFICATIONS FOR ARGUMENTS
INTEGER NEQNS
REAL P, YLEFT(NEQNS), YRIGHT(NEQNS), DFDP(NEQNS)
! SPECIFICATIONS FOR SUBROUTINES
EXTERNAL SSET
! Define dF/dP
CALL SSET (NEQNS, 0.0, DFDP, 1)
RETURN
END
Output
I
T
Y1
Y2
1 0.000000E+00 1.570796E+00
-1.949336E+00
2 4.444445E-02 1.490495E+00
-1.669567E+00
3 8.888889E-02 1.421951E+00
-1.419465E+00
4 1.333333E-01 1.363953E+00
-1.194307E+00
5 2.000000E-01 1.294526E+00
-8.958461E-01
6 2.666667E-01 1.243628E+00
-6.373191E-01
7 3.333334E-01 1.208785E+00
-4.135206E-01
8 4.000000E-01 1.187783E+00
-2.219351E-01
9 4.250000E-01 1.183038E+00
-1.584200E-01
10 4.500000E-01 1.179822E+00
-9.973146E-02
11 4.625000E-01 1.178748E+00
-7.233893E-02
12 4.750000E-01 1.178007E+00
-4.638248E-02
13 4.812500E-01 1.177756E+00
-3.399763E-02
14 4.875000E-01 1.177582E+00
-2.205547E-02
15 4.937500E-01 1.177480E+00
-1.061177E-02
16 5.000000E-01 1.177447E+00
-1.479182E-07
17 5.062500E-01
1.177480E+00 1.061153E-02
18 5.125000E-01
1.177582E+00 2.205518E-02
19 5.187500E-01
1.177756E+00 3.399727E-02
20 5.250000E-01
1.178007E+00 4.638219E-02
21 5.375000E-01
1.178748E+00 7.233876E-02
22 5.500000E-01
1.179822E+00 9.973124E-02
23 5.750000E-01
1.183038E+00 1.584199E-01
24 6.000000E-01
1.187783E+00 2.219350E-01
25 6.666667E-01
1.208786E+00 4.135205E-01
26 7.333333E-01
1.243628E+00 6.373190E-01
27 8.000000E-01
1.294526E+00 8.958461E-01
28 8.666667E-01
1.363953E+00 1.194307E+00
29 9.111111E-01
1.421951E+00 1.419465E+00
30 9.555556E-01
1.490495E+00 1.669566E+00
31 1.000000E+00
1.570796E+00 1.949336E+00
Error estimates
3.448358E-06 5.549869E-05
|
Visual Numerics, Inc. PHONE: 713.784.3131 FAX:713.781.9260 |