Solves a (parameterized) system of differential equations with boundary conditions at two points, using a multiple-shooting method.
Required Arguments
FCNEQN — User-supplied SUBROUTINE to evaluate derivatives. The usage is CALL FCNEQN (NEQNS, T, Y, P, DYDT), where
NEQNS – Number
of equations. (Input)
T – Independent
variable, t. (Input)
Y – Array of length
NEQNS containing
the dependent variable. (Input)
P – Continuation
parameter used in solving highly nonlinear problems. (Input)
See
Comment 4.
DYDT – Array of length
NEQNS containing
yʹ at T.
(Output)
The name FCNEQN must be declared EXTERNAL in the calling program.
FCNJAC — User-supplied SUBROUTINE to evaluate the Jacobian. The usage is CALL FCNJAC (NEQNS, T, Y, P, DYPDY), where
NEQNS – Number of equations. (Input)
T – Independent
variable. (Input)
Y – Array of length
NEQNS containing
the dependent variable. (Input)
P – Continuation
parameter used in solving highly nonlinear problems. (Input)
See
Comment 4.
DYPDY – Array of size
NEQNS by NEQNS containing the
Jacobian. (Output)
The entry DYPDY(i,
j) contains the partial derivative ∂ fi∕∂ yj evaluated at
(t, y).
The name FCNJAC must be declared EXTERNAL in the calling program.
FCNBC — User-supplied SUBROUTINE to evaluate the boundary conditions. The usage is CALL FCNBC (NEQNS, YLEFT, YRIGHT, P, H), where
NEQNS – Number
of equations. (Input)
YLEFT – Array of
length NEQNS
containing the values of Y at TLEFT.
(Input)
YRIGHT – Array of
length NEQNS
containing the values of Y at
TRIGHT.
(Input)
P –
Continuation parameter used in solving highly nonlinear problems.
(Input)
See Comment 4.
H – Array of length
NEQNS containing
the boundary function values. (Output)
The computed solution
satisfies (within BTOL) the conditions
hi
= 0, i = 1, …, NEQNS.
The name FCNBC must be declared EXTERNAL in the calling program.
TLEFT — The left endpoint. (Input)
TRIGHT — The right endpoint. (Input)
NMAX — Maximum
number of shooting points to be allowed. (Input)
If NINIT is nonzero, then
NMAX must equal
NINIT. It must
be at least 2.
NFINAL — Number of final shooting points, including the endpoints. (Output)
TFINAL — Vector
of length NMAX
containing the final shooting points. (Output)
Only the first
NFINAL points
are significant.
YFINAL — Array of size NEQNS by NMAX containing the values of Y at the points in TFINAL. (Output)
Optional Arguments
NEQNS — Number of differential equations. (Input)
DTOL —
Differential equation error tolerance. (Input)
An attempt is
made to control the local error in such a way that the global error is
proportional to DTOL.
Default: DTOL = 1.0e-4.
BTOL — Boundary
condition error tolerance. (Input)
The computed solution
satisfies the boundary conditions, within BTOL
tolerance.
Default: BTOL = 1.0e-4.
MAXIT — Maximum
number of Newton iterations allowed. (Input)
Iteration stops if
convergence is achieved sooner. Suggested values are MAXIT = 2
for linear problems and MAXIT = 9 for
nonlinear problems.
Default: MAXIT = 9.
NINIT — Number of
shooting points supplied by the user. (Input)
It may be 0. A
suggested value for the number of shooting points is 10.
Default: NINIT = 0.
TINIT — Vector of
length NINIT containing the
shooting points supplied by the user. (Input)
If NINIT = 0, then TINIT is not
referenced and the routine chooses all of the shooting points. This automatic
selection of shooting points may be expensive and should only be used for linear
problems. If NINIT is nonzero, then
the points must be an increasing sequence with TINIT(1) = TLEFT and TINIT(NINIT) = TRIGHT. By default, TINIT is not used.
YINIT — Array of
size NEQNS by NINIT containing an
initial guess for the values of Y at the points in TINIT.
(Input)
YINIT is not
referenced if NINIT = 0. By default,
YINIT is not used.
LDYINI — Leading
dimension of YINIT exactly as
specified in the dimension statement of the calling program.
(Input)
Default: LDYINI = size (YINIT ,1).
LDYFIN — Leading
dimension of YFINAL exactly as
specified in the dimension statement of the calling program.
(Input)
Default: LDYFIN = size (YFINAL,1).
FORTRAN 90 Interface
Generic: CALL BVPMS (FCNEQN, FCNJAC, FCNBC, TLEFT, TRIGHT, NMAX, NFINAL, TFINAL, YFINAL [,…])
Specific: The specific interface names are S_BVPMS and D_BVPMS.
FORTRAN 77 Interface
Single: CALL BVPMS (FCNEQN, FCNJAC, FCNBC, NEQNS, TLEFT, TRIGHT, DTOL, BTOL, MAXIT, NINIT, TINIT, YINIT, LDYINI, NMAX, NFINAL, TFINAL, YFINAL, LDYFIN)
Double: The double precision name is DBVPMS.
Description
Define N = NEQNS, M = NFINAL, ta = TLEFT and tb = TRIGHT. The routine BVPMS uses a multiple-shooting technique to solve the differential equation system yʹ = f (t, y) with boundary conditions of the form
hk(y1 (ta), …, yN (ta), y1 (tb), …, yN (tb)) = 0 for k = 1, …, N
A modified version of IVPRK is used to compute the
initial-value problem at each “shot.” If there are M shooting points
(including the endpoints ta and tb), then a system of
NM simultaneous nonlinear equations must be solved. Newton's method is
used to solve this system, which has a Jacobian matrix with a “periodic band”
structure. Evaluation of the NM functions and the
NM ×
NM (almost banded) Jacobian for one iteration of Newton's method is
accomplished in one pass from ta to tb of the modified IVPRK,
operating on a system of N(N + 1) differential equations. For most
problems, the total amount of work should not be highly dependent on M.
Multiple shooting avoids many of the serious ill-conditioning problems that
plague simple shooting methods. For more details on the algorithm, see Sewell
(1982).
The boundary functions should be scaled so that all components hk are of comparable magnitude since the absolute error in each is controlled.
Comments
1. Workspace may be explicitly provided, if desired, by use of B2PMS/DB2PMS. The reference is:
CALL B2PMS (FCNEQN, FCNJAC, FCNBC, NEQNS, TLEFT, TRIGHT, DTOL, BTOL, MAXIT, NINIT, TINIT, YINIT, LDYINI, NMAX, NFINAL, TFINAL, YFINAL, LDYFIN, WORK, IWK)
The additional arguments are as follows:
WORK — Work
array of length NEQNS * (NEQNS + 1)(NMAX + 12) +
NEQNS +
30.
IWK — Work array of length NEQNS.
1 5 Convergence has been achieved; but to get acceptably accurate approximations to y(t), it is often necessary to start an initial-value solver, for example IVPRK, at the nearest TFINAL(i) point to t with t ≥ TFINAL (i). The vectors YFINAL(j, i), j = 1, …, NEQNS are used as the initial values.
4 1 The initial-value integrator failed. Relax the tolerance DTOL or see Comment 3.
4 2 More than NMAX shooting points are needed for stability.
4 3 Newton's iteration did not converge in MAXIT iterations. If the problem is linear, do an extra iteration. If this error still occurs, check that the routine FCNJAC is giving the correct derivatives. If this does not fix the problem, see Comment 3.
4 4 Linear-equation solver failed. The problem may not have a unique solution, or the problem may be highly nonlinear. In the latter case, see Comment 3.
3. Many linear problems will be successfully solved using program-selected shooting points. Nonlinear problems may require user effort and input data. If the routine fails, then increase NMAX or parameterize the problem. With many shooting points the program essentially uses a finite-difference method, which has less trouble with nonlinearities than shooting methods. After a certain point, however, increasing the number of points will no longer help convergence. To parameterize the problem, see Comment 4.
4. If the problem to be solved is highly nonlinear, then to obtain convergence it may be necessary to embed the problem into a one-parameter family of boundary value problems, yʹ = f(t, y, p), h(y(ta, tb, p)) = 0 such that for p = 0, the problem is simple, e.g., linear; and for p = 1, the stated problem is solved. The routine BVPMS/DBVPMS automatically moves the parameter from p = 0 toward p = 1.
5. This routine is not recommended for stiff systems of differential equations.
Example
The differential equations that model an elastic beam are (see Washizu 1968, pages 142−143):
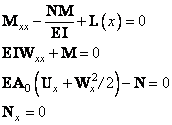
where U is the axial displacement, W is the transverse displacement, N is the axial force, M is the bending moment, E is the elastic modulus, I is the moment of inertia, A0 is the cross-sectional area, and L(x) is the transverse load.
Assume we have a clamped cylindrical beam of radius 0.1in,
a length of 10in, and an elastic modulus E = 10.6 ×
106 lb/in2. Then, I =
0.784 × 10-4, and A0= π10-2 in2, and the boundary
conditions are U = W = Wx= 0 at each end. If we
let y1= U, y2 = N/EA0, y3 = W, y4 = Wx,
y5= M/EI ,
and y6 = Mx/EI, then the
above nonlinear equations can be written as a system of six first-order
equations.
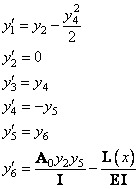
The boundary conditions are y1 = y3 = y4 = 0 at x = 0
and at x = 10. The loading function is
L(x) = −2, if 3 ≤
x ≤ 7, and is zero elsewhere.
The material parameters, A0 = A0, I = AI, and E, are passed to the evaluation subprograms using the common block PARAM.
PARAMETER (NEQNS=6, NMAX=21, LDY=NEQNS)
! SPECIFICATIONS FOR LOCAL VARIABLES
INTEGER I, MAXIT, NFINAL, NINIT, NOUT
REAL TOL, X(NMAX), XLEFT, XRIGHT, Y(LDY,NMAX)
! SPECIFICATIONS FOR COMMON /PARAM/
! SPECIFICATIONS FOR INTRINSICS
! SPECIFICATIONS FOR SUBROUTINES
EXTERNAL FCNBC, FCNEQN, FCNJAC
X(I) = XLEFT + REAL(I-1)/REAL(NINIT-1)*(XRIGHT-XLEFT)
CALL BVPMS (FCNEQN, FCNJAC, FCNBC, XLEFT, XRIGHT, NMAX, NFINAL, &
X, Y, MAXIT=MAXIT, NINIT=NINIT, TINIT=X, YINIT=Y)
WRITE (NOUT,'(26X,A/12X,A,10X,A,7X,A)') 'Displacement', &
WRITE (NOUT,'(F15.1,1P2E15.3)') (X(I),Y(1,I),Y(3,I),I=1,NFINAL)
SUBROUTINE FCNEQN (NEQNS, X, Y, P, DYDX)
! SPECIFICATIONS FOR ARGUMENTS
REAL X, P, Y(NEQNS), DYDX(NEQNS)
! SPECIFICATIONS FOR LOCAL VARIABLES
! SPECIFICATIONS FOR COMMON /PARAM/
IF (X.GT.3.0 .AND. X.LT.7.0) FORCE = -2.0
DYDX(1) = Y(2) - P*0.5*Y(4)**2
DYDX(6) = P*A0*Y(2)*Y(5)/A1 - FORCE/E/A1
SUBROUTINE FCNBC (NEQNS, YLEFT, YRIGHT, P, F)
! SPECIFICATIONS FOR ARGUMENTS
REAL P, YLEFT(NEQNS), YRIGHT(NEQNS), F(NEQNS)
! SPECIFICATIONS FOR COMMON /PARAM/
SUBROUTINE FCNJAC (NEQNS, X, Y, P, DYPDY)
! SPECIFICATIONS FOR ARGUMENTS
REAL X, P, Y(NEQNS), DYPDY(NEQNS,NEQNS)
! SPECIFICATIONS FOR COMMON /PARAM/
! SPECIFICATIONS FOR SUBROUTINES
Output
Displacement
X
Axial Transverse
0.0 1.631E-11
-8.677E-10
5.0
1.914E-05
-1.273E-03
10.0
2.839E-05
-4.697E-03
15.0
2.461E-05
-9.688E-03
20.0
1.008E-05 -1.567E-02
25.0
-9.550E-06
-2.206E-02
30.0
-2.721E-05
-2.830E-02
35.0
-3.644E-05
-3.382E-02
40.0
-3.379E-05
-3.811E-02
45.0
-2.016E-05
-4.083E-02
50.0
-4.414E-08
-4.176E-02
55.0
2.006E-05
-4.082E-02
60.0
3.366E-05
-3.810E-02
65.0
3.627E-05
-3.380E-02
70.0
2.702E-05
-2.828E-02
75.0
9.378E-06
-2.205E-02
80.0
-1.021E-05
-1.565E-02
85.0
-2.468E-05
-9.679E-03
90.0
-2.842E-05
-4.692E-03
95.0
-1.914E-05
-1.271E-03
100.0
0.000E+00 0.000E+00
|
Visual Numerics, Inc. PHONE: 713.784.3131 FAX:713.781.9260 |