Solves a quadratic programming problem subject to linear equality/inequality constraints.
Required Arguments
NEQ — The number of linear equality constraints. (Input)
A — NCON by NVAR
matrix. (Input)
The matrix contains the equality contraints in
the first NEQ
rows followed by the inequality constraints.
B — Vector of length NCON containing right-hand sides of the linear constraints. (Input)
G — Vector of length NVAR containing the coefficients of the linear term of the objective function. (Input)
H — NVAR by NVAR matrix containing
the Hessian matrix of the objective function. (Input)
H should be symmetric
positive definite; if H is not positive
definite, the algorithm attempts to solve the QP problem with H replaced by a H + DIAGNL * I such that
H + DIAGNL * I is positive
definite. See Comment 3.
SOL — Vector of length NVAR containing solution. (Output)
Optional Arguments
NVAR — The number
of variables. (Input)
Default: NVAR = size
(A,2).
NCON — The number
of linear constraints. (Input)
Default: NCON = size
(A,1).
LDA — Leading
dimension of A
exactly as specified in the dimension statement of the calling
program. (Input)
Default: LDA = size
(A,1).
LDH — Leading
dimension of H
exactly as specified in the dimension statement of the calling
program. (Input)
Default: LDH = size
(H,1).
DIAGNL — Scalar equal to the multiple of the identity matrix added to H to give a positive definite matrix. (Output)
NACT — Final number of active constraints. (Output)
IACT — Vector of length NVAR containing the indices of the final active constraints in the first NACT positions. (Output)
ALAMDA — Vector of length NVAR containing the Lagrange multiplier estimates of the final active constraints in the first NACT positions. (Output)
FORTRAN 90 Interface
Generic: CALL QPROG (NEQ, A, B, G, H, SOL [,…])
Specific: The specific interface names are S_QPROG and D_QPROG.
FORTRAN 77 Interface
Single: CALL QPROG (NVAR, NCON, NEQ, A, LDA, B, G, H, LDH, DIAGNL, SOL, NACT, IACT, ALAMDA)
Double: The double precision name is DQPROG.
Description
The routine QPROG is based on M.J.D. Powell's implementation of the Goldfarb and Idnani (1983) dual quadratic programming (QP) algorithm for convex QP problems subject to general linear equality/inequality constraints, i.e., problems of the form
subject to A1x = b1
A1x ≥ b2
given the vectors b1, b2, and g and the matrices H, A1, and A2. H is required to be positive definite. In this case, a unique x solves the problem or the constraints are inconsistent. If H is not positive definite, a positive definite perturbation of H is used in place of H. For more details, see Powell (1983, 1985).
Comments
1. Workspace may be explicitly provided, if desired, by use of Q2ROG/DQ2ROG. The reference is:
CALL Q2ROG (NVAR, NCON, NEQ, A, LDA, B, G, H, LDH, DIAGNL, SOL, NACT, IACT, ALAMDA, WK)
The additional argument is:
WK — Work vector of length (3 * NVAR**2 + 11 * NVAR)/2 + NCON.
2. Informational errors
Type Code
3 1 Due to the effect of computer rounding error, a change in the variables fail to improve the objective function value; usually the solution is close to optimum.
4 2 The system of equations is inconsistent. There is no solution.
3.
If a perturbation of H, H + DIAGNL * I, was used in the
QP problem, then
H + DIAGNL * I should also be used
in the definition of the Lagrange multipliers.
Example
The quadratic programming problem

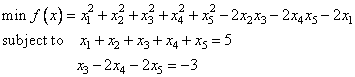
is solved.
USE QPROG_INT
USE UMACH_INT
IMPLICIT NONE
! Declare variables
INTEGER LDA, LDH, NCON, NEQ, NVAR
PARAMETER (NCON=2, NEQ=2, NVAR=5, LDA=NCON, LDH=NVAR)
!
INTEGER K, NACT, NOUT
REAL A(LDA,NVAR), ALAMDA(NVAR), B(NCON), G(NVAR), &
H(LDH,LDH), SOL(NVAR)
!
! Set values of A, B, G and H.
! A = ( 1.0 1.0 1.0 1.0 1.0)
! ( 0.0 0.0 1.0 -2.0 -2.0)
!
! B = ( 5.0 -3.0)
!
! G = (-2.0 0.0 0.0 0.0 0.0)
!
! H = ( 2.0 0.0 0.0 0.0 0.0)
! ( 0.0 2.0 -2.0 0.0 0.0)
! ( 0.0 -2.0 2.0 0.0 0.0)
! ( 0.0 0.0 0.0 2.0 -2.0)
! ( 0.0 0.0 0.0 -2.0 2.0)
!
DATA A/1.0, 0.0, 1.0, 0.0, 1.0, 1.0, 1.0, -2.0, 1.0, -2.0/
DATA B/5.0, -3.0/
DATA G/-2.0, 4*0.0/
DATA H/2.0, 5*0.0, 2.0, -2.0, 3*0.0, -2.0, 2.0, 5*0.0, 2.0, &
-2.0, 3*0.0, -2.0, 2.0/
!
CALL QPROG (NEQ, A, B, G, H, SOL)
!
CALL UMACH (2, NOUT)
WRITE (NOUT,99999) (SOL(K),K=1,NVAR)
99999 FORMAT (' The solution vector is', /, ' SOL = (', 5F6.1, &
' )')
!
END
Output
The solution vector is
SOL = ( 1.0
1.0 1.0 1.0 1.0 )
|
Visual Numerics, Inc. PHONE: 713.784.3131 FAX:713.781.9260 |