Solves a first order differential-algebraic system of equations, g(t, y, y¢) = 0, using the Petzold-Gear BDF method.
Synopsis
#include <imsl.h>
void imsl_f_dea_petzold_gear_mgr (int task, void **state, …,0)
int
imsl_f_dea_petzold_gear (int neq, float *t, float tend, float
y[],
float yprime[], void *state, int gcn(), …,0)
The type double functions are imsl_d_dea_petzold_gear_mgr and imsl_d_dea_petzold_gear.
The function imsl_f_dea_petzold_gear_mgr is used to initialize and reset the problem, and the function imsl_f_dea_petzold_gear is the integrator. The descriptions of both of these functions are provided below.
Required Arguments for imsl_f_dea_petzold_gear_mgr
int task
(Input)
This function must be called with task set to IMSL_DEA_INITIALIZE to
set up for solving a system and with task equal to IMSL_DEA_RESET to
clean up after it has been solved. These values for task are defined in
the include file, imsl.h.
void **state
(Input/Output)
The current state of the solution is held in a structure
pointed to by state. It cannot
be directly manipulated.
Required Arguments for imsl_f_dea_petzold_gear
int neq
(Input)
The number of equations, g(t, y, y¢) = 0
float *t
(Input/Output)
Independent variable. On input, t is the initial
independent variable value. On output, t is replaced by tend, unless error
conditions arise.
float tend
(Input)
Mathematical value of t where the solution is
desired.
float y[]
(Input/Output)
Array with neq components
containing the dependent variable values. This array must contain initial
values when the integration starts.
float yprime[]
(Input/Output)
Array with neq components
containing the derivative values, y¢. This array must contain
initial values, but they need not be consistent. This function will solve
for consistent values of y¢ to
satisfy the equations at the starting point.
void *state
(Input/Output)
The current state of the solution is held in a structure
pointed to by state. It must
be initialized by a call to imsl_f_dea_petzold_gear_mgr.
It cannot be directly manipulated.
int gcn (int neq,
float t, float
*y,
float *yprime,
float *gval)
(Input)
User-supplied function to evaluate g(t, y,
y¢) where
float *gval
(Output)
Array with neq components
containing the function values g(t, y, y¢).
gcn
returns an int value representing a panic flag.
After an evaluation
of g, this panic flag is checked. The value of g is used if the
flag is 0. If it has the value -1, the
function reduces the step size and possibly the order of the BDF. If the value
is -2, the function returns control to
the user immediately.
Return Value
Returns a flag that reports what the function did.
|
Value |
Explanation |
|
0 |
Normal return. |
|
1 |
A step was taken in the intermediate output mode. The value tend has not been reached. |
|
2 |
The integration to exactly t_barrier was completed. |
|
3 |
The integration to t_barrier was completed by stepping past t_barrier and interpolating to evaluate y and y¢. |
|
-1 |
Too many steps taken. |
|
-2 |
Error tolerances are too small. |
|
-3 |
A pure relative error tolerance can't be satisfied. |
|
-6 |
There were repeated error test failures on the last step. |
|
-7 |
The BDF corrector equation solver did not converge. |
|
-8 |
The matrix of partial derivatives is singular. |
|
-10 |
The BDF corrector equation solver did not converge because the evaluation failure flag was raised. |
|
-11 |
The evaluation failure flag was raised to quit. |
|
-12 |
The iteration for the initial value of y¢ did not converge. |
|
-33 |
There is a fatal error, perhaps caused by invalid input. |
Synopsis with Optional Arguments for imsl_f_dea_petzold_gear_mgr
#include <imsl.h>
void imsl_f_dea_petzold_gear_mgr (int task, void **state,
IMSL_INITIAL_STEPSIZE, float intitial_stepsize,
IMSL_T_BARRIER, float t_barrier,
IMSL_MAX_BDF_ORDER, int max_bdf_order,
IMSL_INITIAL_VALUES_INCONSISTENT,
IMSL_JACOBIAN, void jgcn(),
IMSL_JACOBIAN_W_DATA, void jgcn(), void *data,
IMSL_GCN_W_DATA, int gcn(), void *data,
IMSL_NORM_FCN, float norm_fcn(),
IMSL_NORM_FCN_W_DATA, float norm_fcn(),void *data,
IMSL_USER_JAC_FACTOR_SOLVE, void
jgcn(), int fac(),
void sol(),
IMSL_USER_JAC_FACTOR_SOLVE_W_DATA, void
jgcn(),
int fac(), void sol(), void *data,
0)
Optional Arguments
IMSL_INITIAL_STEPSIZE,
float
initial_stepsize
(Input)
The initial stepsize.
Default: Computed
internally.
IMSL_T_BARRIER, float t_barrier
(Input)
This optional argument controls whether the code should integrate
past a special point, t_barrier, and then
interpolate to get y and y¢ at tend. If this optional
argument is not present, this is permitted. If this optional argument is
present, the code assumes the equations either change on the alternate sides of
t_barrier or
they are undefined there. In this case, the code creeps up to t_barrier in the
direction of integration.
IMSL_MAX_BDF_ORDER,
int
max_bdf_order
(Input)
Maximum order of the Backward Difference Formula (BDF) to be
used.
Default: 5
IMSL_INITIAL_VALUES_INCONSISTENT,
(Input)
This optional argument controls whether the initial values (t,
y, y¢) are consistent. If
this optional argument is not supplied, g(t, y,
y¢) = 0 at the initial point,
otherwise the function will try to solve for y¢ to satisfy this equation.
IMSL_JACOBIAN, void jgcn(int neq,
float t, float
y[],
float yprime[],
float cj, float
*pdg)
(Input)
User-supplied function to compute the partial derivatives of
g(t, y, y¢)
where cj is the
value cj used in computing the step size and BDF,
and pdg is an array of size
neq by neq containing the
partial derivatives
A = [¶g/¶y + cj¶g/¶y¢]. Each nonzero derivative entry
aij is
computed and returned in the array location pdg[i*neq+j]. The
array contents are zero when jgcn is called. Thus,
only the nonzero derivatives have to be defined in jgcn.
Default: Partial derivatives are computed using divided
differences.
IMSL_JACOBIAN_W_DATA,
void
jgcn(int neq,
float t, float
y[],
float yprime[],
float cj, float
*pdg,
void *data), void
*data
(Input)
User-supplied function to compute the partial derivatives of
g(t, y, y¢) which also accepts a pointer to data
that is supplied by the user. data is a pointer to
the data to be passed to the user-supplied function. See the Introduction, Passing Data to User-Supplied
Functions
at the beginning of this
manual for more details.
IMSL_GCN_W_DATA,
int
gcn(int neq,
float t, float
*y,
float *yprime,
float *gval,
void *data), void *data
(Input)
User-supplied function to evaluate g(t, y,
y¢). data is a pointer to
the data to be passed to the user-supplied function. See the Introduction, Passing Data to User-Supplied
Functions
at the beginning of this
manual for more details.
IMSL_NORM_FCN, float norm_fcn(int
neq,
float v[],
float wt[])
(Input)
User-supplied function to measure the size of the estimated error in
each step. Default: The RMS weighted norm given by:

IMSL_NORM_FCN_W_DATA, float norm_fcn(int
neq,
float v[],
float wt[],
void *data), void
*data
(Input)
User-supplied function to measure the size of the estimated error in
each step. data
is a pointer to the data to be passed to the user-supplied function. See
the Introduction, Passing Data to
User-Supplied Functions at the beginning of this manual for more
details.
IMSL_USER_JAC_FACTOR_SOLVE,
void
jgcn(int neq,
float t, float
y[],
float yprime[],
float cj), int fac(),
void
sol(int neq, float
*g,
float *y)
(Input)
User-supplied functions to compute the partial derivatives
A = [¶g/¶y + cj¶g/¶y¢], factor A, and solve the system
ADy = Dg. Using this optional argument
allows for handing the factorization and solution steps in a problem specific
manner. If successful fac should return 0,
if unsuccessful, fac should return a
non-zero value. See Example 5 for sample usage of this optional
argument.
IMSL_USER_JAC_FACTOR_SOLVE_W_DATA,
void
jgcn(int neq,
float t, float
y[],
float yprime[],
float cj, void *data), int fac(void *data), void sol(int neq, float
*g, float
*y, void
*data),
void *data
(Input)
User-supplied functions to compute the partial
derivatives
A = [¶g/¶y + cj¶g/¶y¢], factor A, and solve the system
ADy = Dg. The argument called data is a pointer to
the data that is passed to the user-supplied function. See Example 5 for sample usage of this optional
argument.
Synopsis with Optional Arguments for imsl_f_dea_petzold_gear
#include <imsl.h>
int imsl_f_dea_petzold_gear (int neq, float *t, float tend, float y[], float yprime[], void **state, int gcn(),
IMSL_ATOL_RTOL_ARRAYS, float *atol, float *rtol,
IMSL_ATOL_RTOL_SCALARS, float atol, float rtol,
IMSL_MAX_NUMBER_STEPS,int max_steps,
IMSL_MAX_STEP, float max_stepsize,
IMSL_ALL_NONNEGATIVE,
IMSL_BDF_ORDER_NEXT_STEP, int next_bdf_order,
IMSL_BDF_ORDER_PREVIOUS_STEP, *int prev_bdf_order,
IMSL_NSTEPS_TAKEN, int *nsteps_taken,
IMSL_NFCN, int *nfcn,
IMSL_NFCNJ, int *nfcnj,
IMSL_NERROR_TEST_FAILURES, int *nerror_test_failures,
IMSL_NCONV_TEST_FAILURES, int *nconv_test_failures,
IMSL_CONDITION, float *condition,
0)
Optional Arguments
IMSL_ATOL_RTOL_ARRAYS,
float *atol, float *rtol
(Input)
Componentwise tolerances are used for the solution. Arguments
atol and rtol are pointers to
arrays of length neq to be used for the
absolute tolerance and relative tolerance, to be applied to each component of
the solution, y. See optional argument IMSL_ATOL_RTOL_SCALARS
if scalar values of absolute and relative tolerances are to be applied to all
components.
Default: All elements of atol and rtol are set to sqrt(imsl_f_machine(4)).
IMSL_ATOL_RTOL_SCALARS,
float atol, float rtol
(Input)
Scalar values that apply to the error estimates of all components of
y.
See optional argument IMSL_ATOL_RTOL_ARRAYS
if separate tolerances are to be applied to each component of y.
Default
: atol and
rtol are sqrt(imsl_f_machine(4)).
IMSL_MAX_NUMBERSTEPS, int max_steps
(Input)
The maximum number of steps.
Default: 500
IMSL_MAX_STEP, float max_stepsize
(Input)
The maximum step size allowed.
Default: imsl_f_machine(2).
IMSL_ALL_NONNEGATIVE
(Input)
This optional argument controls attempts to constrain all components
to be nonnegative.
Default: This constraint is not enforced.
IMSL_BDF_ORDER_NEXT_STEP,
int
next_bdf_order
(Input)
The step size to be attempted on the next move.
Default:
Computed internally.
IMSL_BDF_ORDER_PREVIOUS_STEP, int *prev_bdf_order,
(Output)
Order of the BDF method used on the last step.
IMSL_NSTEPS_TAKEN,
int
*nsteps_taken
(Output)
The number of steps taken so far.
IMSL_NFCN, int *nfcn
(Output)
The number of times that g has been evaluated.
IMSL_NFCNJ,
int
*nfcn
(Output)
The number of times that the partial derivative matrix has been
evaluated.
IMSL_NERROR_TEST_FAILURES,
int
*nerror_test_failures
(Output)
The total number of error test failures so far.
IMSL_NCONV_TEST_FAILURES,
int
*nerror_test_failures,
(Output)
The total number of convergence test failures so far. This includes
singular iteration matrices.
IMSL_CONDITION,
float
*condition
(Output)
The reciprocal of the condition number of the matrix A.
This optional argument cannot be used if optional argument IMSL_USER_EVAL_FACTOR_SOLVE
is used in the call to imsl_f_petzold_gear_mgr.
Description
Function imsl_f_dea_petzold_gear finds an approximation to the solution of a system of differential-algebraic equations g(t, y, y¢) = 0, with given initial data for y and y¢. imsl_f_dea_petzold_gear uses BDF formulas, appropriate for systems of stiff ODEs, and attempts to keep the global error proportional to a user-specified tolerance. See Brenan et al. (1989). imsl_f_dea_petzold_gear is efficient for stiff differential-algebraic systems of index 1 or index 0. See Brenan et al. (1989) for a definition of index. Users are encouraged to use double precision accuracy on machines with a short float precision accuracy. The examples given below are in float accuracy because of the desire for consistency with the rest of IMSL C Numerical Library examples. Function imsl_f_dea_petzold_gear is based on the code DASSL designed by L. Petzold (1982-1990).
Example 1
The Van der Pol equation u² + m(u2 - 1) u¢ + u = 0, m > 0, is a single ordinary differential equation with a periodic limit cycle. See Hartman (1964, page 181). For the value m = 5, the equation is integrated from t = 0 until the limit has clearly developed at t = 26. The (arbitrary) initial conditions used here are u(0) = 2 and u¢(0) = - 2/3. Except for these initial conditions and the final t value, this is problem (E2) of the Enright and Pryce (1987) test package. This equation is solved as a differential-algebraic system by defining the first-order system:
Note that the initial condition for the sample program is not consistent, g ¹ 0 at t = 0. The optional argument IMSL_INITIAL_VALUES_INCONSISTENT is used to reflect this.
static int gcn(int n, float t, float y[], float ypr[], float gval[]);
float delt, t, tend, y[N], ypr[N];
imsl_f_dea_petzold_gear_mgr(IMSL_DEA_INITIALIZE, &state,
IMSL_INITIAL_VALUES_INCONSISTENT,
for (istep = 0; istep < nstep; istep++) {
imsl_f_dea_petzold_gear(n, &t, tend, y, ypr, state, gcn, 0);
imsl_f_dea_petzold_gear_mgr(IMSL_DEA_RESET, &state, 0);
printf(" T y[0] y[1] y'[0] y'[1]\n");
printf("%10.2f %10.5f %10.5f %10.5f %10.5f\n",
tend, y[0], y[1], ypr[0], ypr[1]);
static int gcn(int n, float t, float y[], float ypr[], float gval[])
gval[1] = (1.0-y[0]*y[0])*y[1] - eps*(y[0]+ypr[1]);
Output
26.00 1.46223 -0.24127 -0.24274 -0.09163
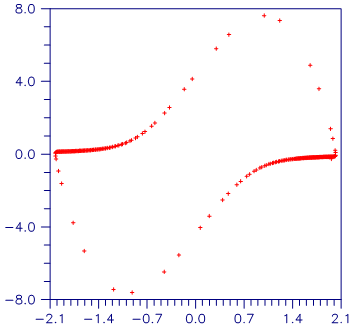
Figure 5-1 Van der Pol Cycle, (u(t), u¢(t)), m = 5.
Example 2
The first-order equations of motion of a point-mass
m suspended on a massless wire of length  under the influence of
gravity force, mg and tension value l, in Cartesian coordinates, (p,
q), are
under the influence of
gravity force, mg and tension value l, in Cartesian coordinates, (p,
q), are
This is a genuine differential-algebraic system. The problem, as stated, has an index number equal to the value 3. Thus, it cannot be solved with imsl_f_dea_petzold_gear directly. Unfortunately, the fact that the index is greater than 1 must be deduced indirectly. Typically there will be an error processed which states that the (BDF) corrector equation did not converge. The user then differentiates and replaces the constraint equation. This example is transformed to a problem of index number of value 1 by differentiating the last equation twice. This resulting equation, which replaces the given equation, is the total energy balance:

With initial conditions and systematic definitions of the dependent variables, the system becomes:
The problem is given in English measurement units of feet, pounds, and seconds. The wire has length 6.5 ft, and the mass at the end is 98 lb. Usage of the software does not require it, but standard or “SI” units are used in the numerical model. This conversion of units is done as a first step in the user-supplied evaluation function gcn. A set of initial conditions, corresponding to the pendulum starting in a horizontal position, are provided as output for the input signal of n = 0. The maximum magnitude of the tension parameter, l(t) = y5(t), is computed at the output points, t = 0.1, p, (0.1). This extreme value is converted to English units and printed.
static int gcn(int n, float t, float y[], float ypr[], float gval[]);
float delt, gval[N], maxlb, maxten, t, tend, tmax, y[N], ypr[N];
imsl_f_dea_petzold_gear_mgr(IMSL_DEA_INITIALIZE, &state, 0);
tend = imsl_f_constant("pi", 0);
for (istep =0; istep < nstep; istep++) {
imsl_f_dea_petzold_gear(n, &t, tend, y, ypr, state, gcn, 0);
if (fabs(y[4]) > fabs(maxten)) {
imsl_f_dea_petzold_gear_mgr(IMSL_DEA_RESET, &state, 0);
printf("max tension = %f at tmax = %f\n", maxten/.4536, tmax);
static int gcn(int n, float t, float y[], float ypr[], float gval[])
static float feetl, grav, lensq, masskg, masslb, meterl, mg;
/* Convert from English to Metric units. */
* The pendulum is horizontal with these initial y values.
y[1] = y[2] = y[3] = y[4] = 0.;
ypr[0] = ypr[1] = ypr[2] = ypr[3] = ypr[4] = 0.;
gval[2] = -y[0]*y[4]-masskg*ypr[2];
gval[3] = -y[1]*y[4]-masskg*ypr[3] - mg;
gval[4] = masskg*(y[2]*y[2] + y[3]*y[3]) - mg*y[1] - lensq*y[4];
Output
max tension = 1457.800218 at tmax = 2.500000
Example 3
In this example, we solve a stiff ordinary differential equation (E5) from the test package of Enright and Pryce (1987). The problem is nonlinear with nonreal eigenvalues. It is included as an example because it is a stiff problem, and its partial derivatives are provided in the user supplied function. Providing explicit formulas for partial derivatives is an important consideration for problems where evaluations of the function g(t, y, y¢) are expensive. In addition, an initial integration step-size is given for this test problem. The error tolerance is changed from the defaults to a pure absolute tolerance of 0.1 * sqrt(imsl_f_machine(4)).
static int gcn(int n, float t, float y[], float ypr[], float gval[]);
static void jgcn(int n, float t, float y[], float ypr[], float cj, float *pdg);
float c0, t, tend, y[N], ypr[N];
imsl_f_dea_petzold_gear_mgr(IMSL_DEA_INITIALIZE, &state,
IMSL_INITIAL_STEPSIZE, 5.0e-5,
ypr[0] = ypr[1] = ypr[2] = ypr[3] = 0;
imsl_f_dea_petzold_gear(n, &t, tend, y, ypr, state, gcn,
IMSL_ATOL_RTOL_SCALARS, 0.1*sqrt(imsl_f_machine(4)), 0.0,
imsl_f_write_matrix("Y", 1, 4, y, IMSL_WRITE_FORMAT, "%10.5f", 0);
imsl_f_write_matrix("YPR", 1, 4, ypr, IMSL_WRITE_FORMAT, "%10.5f", 0);
imsl_f_dea_petzold_gear_mgr(IMSL_DEA_RESET, &state, 0);
static int gcn(int n, float t, float y[], float ypr[], float gval[])
gval[0] = -C1*y[0] - C2*y[0]*y[2] - ypr[0];
gval[1] = C1*y[0] - C3*y[1]*y[2] - ypr[1];
gval[2] = C1*y[0] - C2*y[0]*y[2] + C4*y[3] - C3*y[1]*y[2] - ypr[2];
gval[3] = C2*y[0]*y[2] - C4*y[3] - ypr[3];
static void jgcn(int n, float t, float y[], float ypr[], float cj,
#define PDG(I,J) *(pdg+(I)*(n)+(J))
PDG(0,0) = -C1 - C2*y[2] - cj;
PDG(2,2) = -C2*y[0] - C3*y[1] - cj;
Output
0.00162 0.00000 0.00000 0.00000
-0.00000 -0.00000 -0.00000 -0.00000
Example 4
In this example, we compute the solution of n = 10
ordinary differential equations,
g = Hy - y¢, where y(0)
= y0 = (1, 1, ¼, 1)T. The value

is evaluated at t = 1. The constant matrix H has entries hi,j = min(j - i, 0) so it is lower Hessenberg. We use the optional arguments IMSL_FCN_W_DATA and IMSL_JACOBIAN_W_DATA to to pass H to the user-supplied functions for the evaluation of the following intermediate quantities:
2. The partial derivative matrix A = ¶g/¶y + cj¶g/¶y¢ = H - cj I,
static int gcn(int n, float t, float y[], float ypr[], float gval[],
static void jgcn(int n, float t, float y[], float ypr[], float cj,
float t, tend, y[N], ypr[N], sumy, h[N*N];
* Initialize the solver. Use optional arguments to
* allow passing problem specific data to the user
imsl_f_dea_petzold_gear_mgr(IMSL_DEA_INITIALIZE, &state,
IMSL_JACOBIAN_W_DATA, jgcn, h,
for (j = 0; j < n; j++) H(i,j) = 0;
/* Initialize lower Hessenberg matrix. */
for (j = 0; j < i + 2; j++) H(i,j) = j-i;
for (j = 0; j < n; j++) H(N-1,j) = j-N+1;
* Integrate the DEA/ODE. Note, the function to
* evaluate g() was defined int the call to
* imsl_f_dea_petzold_gear_mgr().
imsl_f_dea_petzold_gear(n, &t, tend, y, ypr, state, NULL, 0);
for (i = 0; i < N; i++) sumy += y[i];
printf(" %15.5f %15.5f\n", tend, sumy);
imsl_f_dea_petzold_gear_mgr(IMSL_DEA_RESET, &state, 0);
static int gcn(int n, float t, float y[], float ypr[], float gval[],
Hy = imsl_f_mat_mul_rect("A*x",
for (i = 0; i < n; i++) gval[i] = Hy[i] - ypr[i];
static void jgcn(int n, float t, float y[], float ypr[], float cj,
#define PDG(I,J) *(pdg+(I)*(n)+(J))
for (i = 0; i < n * n; i++) pdg[i] = h[i];
for (i = 0; i < n; i++) PDG(i,i) -= cj;
Output
Example 5
In this example, we solve the same problem as in Example 4, but use the optional argument IMSL_EVAL_FACTOR_SOLVE_W_DATA to supply functions to compute the partial derivatives A = [¶g/¶y + cj¶g/¶y¢]¢, factor A, and solve the system ADy = Dg. The optional argument IMSL_EVAL_FACTOR_SOLVE_W_DATA also allows for supplying a pointer to problem-specific data that will be passed to the user-spplied functions when they are called from imsl_f_dea_petzold_gear. The problem specific data in this example is the lower Hessenberg matrix H, and the array A that will contain the partial derivatives A = [¶g/¶y + cj¶g/¶y¢]¢, and factored form of this matrix. Note, in this example, the matrix A containing the partial derivatives and factored form of this matrix is stored local to the example. Using the optional argument IMSL_EVAL_FACTOR_SOLVE_W_DATA allows us to apply problem specific techniques to factor A, and solve the system ADy = Dg.
This example can also serves as a prototype for large, structured (possibly nonlinear) DAE problems where the user must use special methods to store and factor the matrix A and solve the linear system ADy = Dg. The word “factor” is used literally here. A user could, for instance, solve the system using an iterative method. Generally, the factor step can be any preparatory phase required for a later solve step.
/* Prototypes for local functions. */
static int gcn(int n, float t, float y[], float ypr[], float gval[],
static void jgcn(int n, float t, float y[], float ypr[], float cj,
static void sol(int neq, float *wk, float *gval, void *data);
static void srotg (float *sa, float *sb, float *sc, float *ss);
* Define a structure that will be used when passing user-data to
* the user-supplied functions.
float t, tend, y[N], ypr[N], sumy;
for (j = 0; j < n; j++) H(i,j) = 0;
/* Initialize lower Hessenberg matrix. */
for (j = 0; j < i + 2; j++) H(i,j) = j-i;
for ( j = 0; j < n; j++) H(N-1,j) = j-N+1;
* Set the pointers to be used in the user-data passed to the
* user-supplied functions. data.a points to the array of partial
* derivatives matrix A, data.h points to the lower Hessenberg matrix H.
* Initialize the solver. Use the optional arguments that permit passing
* user-data to the user-supplied functions.
imsl_f_dea_petzold_gear_mgr(IMSL_DEA_INITIALIZE, &state,
IMSL_USER_JAC_FACTOR_SOLVE_W_DATA, jgcn, fac,
* Integrate the DEA/ODE. Note, the function to
* evaluate g() was defined int the call to
* imsl_f_dea_petzold_gear_mgr().
imsl_f_dea_petzold_gear(n, &t, tend, y, ypr, state, NULL, 0);
for (i = 0; i < N; i++) sumy += y[i];
printf(" %15.5f %15.5f\n", tend, sumy);
imsl_f_dea_petzold_gear_mgr(IMSL_DEA_RESET, &state, 0);
* Function to evaluate g(t, y, y').
static int gcn(int n, float t, float y[], float ypr[], float gval[],
float *h = ((problem_data*)data)->h;
Hy = imsl_f_mat_mul_rect("A*x",
for (i = 0; i < n; i++) gval[i] = Hy[i] - ypr[i];
* Function to compute partial derivatives.
static void jgcn(int n, float t, float y[], float ypr[], float cj, void *data)
float *a = ((problem_data*)data)->a;
float *h = ((problem_data*)data)->h;
for (i = 0; i< n * n; i++) a[i] = h[i];
for (i = 0; i < n; i++) A(i,i) -= cj;
* Function to compute factorization of A.
float *a = ((problem_data*)data)->a;
float *h = ((problem_data*)data)->h;
/* Construct Givens transformations. */
srotg(&(A(j,j)), &(A(j,j+1)), &sc, &ss);
/* Apply a Givens transformations. */
for (i = 0; i < n - j - 1; i++) {
stemp = sc * A(j+1+i, 0) + ss * A(j+1+i, j+1);
A(j+1+i, j+1) = sc * A(j+1+i, j+1) - ss * A(j+1+i, 0);
static void sol(int n, float *g, float *y, void *data)
float *a = ((problem_data*)data)->a;
for (j = 0; j < n; j++) y[j] = g[j];
for (i = 0; i < n - j - 1; i++) y[j+1+i] += -y[j]*A(j+1+i,j);
/* Reconstruct Givens rotations. */
for (j = n - 2; j >= 0; j--) {
ss = sqrt(1.0e0 - pow(sc, 2));
stemp = sc * y[j] + ss * y[j+1];
y[j+1] = sc * y[j+1] - ss * y[j];
* Local function used during the factorization of A to
* construct a Givens plane rotation.
static void srotg (float *sa, float *sb, float *sc, float *ss)
/* Construct a Givens plane rotation */
if (fabs (*sa) > fabs (*sb)) {
|
Visual Numerics, Inc. PHONE: 713.784.3131 FAX:713.781.9260 |